
8-900-374-94-44

Методы аналоговой модуляции при передаче данных Когда мы хотим передать данные, используя аналоговые телефонные линии, мы должны конвертировать электрические сигналы, исходящие от DTE, в форму приемлемую
Подробнее ОСНОВЫ ЦИФРОВЫХ ТЕХНОЛОГИЙ Часть 2 Методы модуляции. Помехоустойчивость Песков С.Н., зам.директора по науке компании Контур-М, к.т.н. Барг А.И.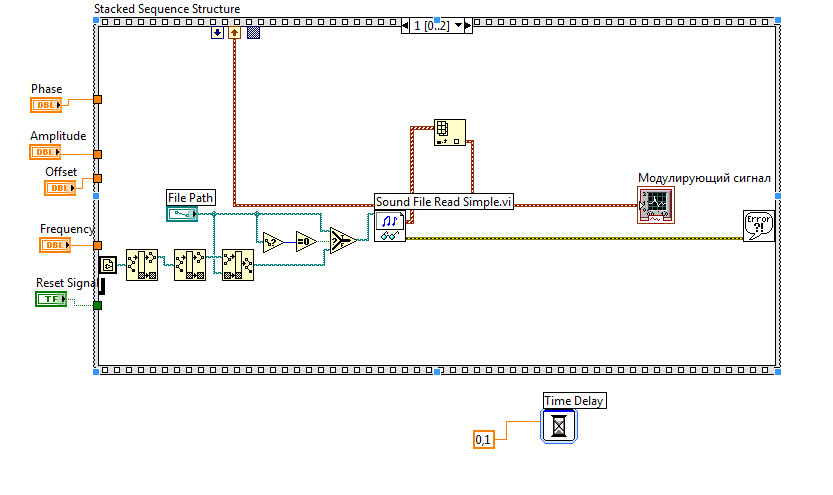
Беспроводные сенсорные сети Тема 4: Основы радиопередачи МАИ каф. 609, Терентьев М.Н., [email protected] Вэтой теме Радиоволны Распространение радиоволн различных частот Аналоговые и цифровые сигналы Диапазоны
ПодробнееР А Д И О Т Е Х Н И К А И Р А Д И О Э Л Е К Т Р О Н И К А МИР ИЗМЕРЕНИЙ 5/2008 12 Измерения параметров векторной модуляции А.В. Пивак, кандидат технических наук ЗАО ПриСТ, Москва Измерения параметров модуляции
Подробнее Практическое занятие 3 Определение BER Из теории связи известно, что существуют две основные причины снижения достоверности передачи.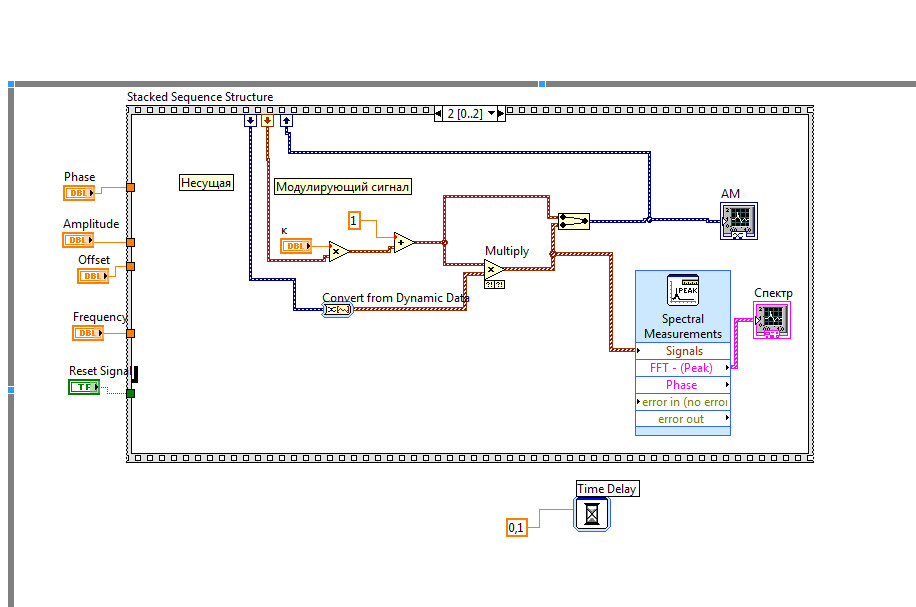
12 АВТОМЕТРИЯ. 215. Т. 51, 6 УДК 621.373.826 МОДУЛЯЦИЯ ИЗЛУЧЕНИЯ ЛАЗЕРНОГО ДИОДА МНОГОКАНАЛЬНЫМИ ЦИФРОВЫМИ ТВ-СИГНАЛАМИ 64-QAM И 256-QAM В. А. Варданян Сибирский государственный университет телекоммуникаций
ПодробнееАнализатор РАП DVB2 предназначен для измерения параметров цифровых ТВ-передатчиков и параметров цифрового транспортного потока. Характеристики анализатора обеспечиваются после 20-минутного прогрева при
Подробнее ТЕЛЕКОММУНИКАЦИИ И СВЯЗЬ 4, апрель 2009 КОМПОНЕНТЫ ДЛЯ ПОСТРОЕНИЯ БЕСПРОВОДНЫХ УСТРОЙСТВ СВЯЗИ, часть 2 Bстатье рассматриваются пути построения беспроводных устройств связи и компоненты для их реализации.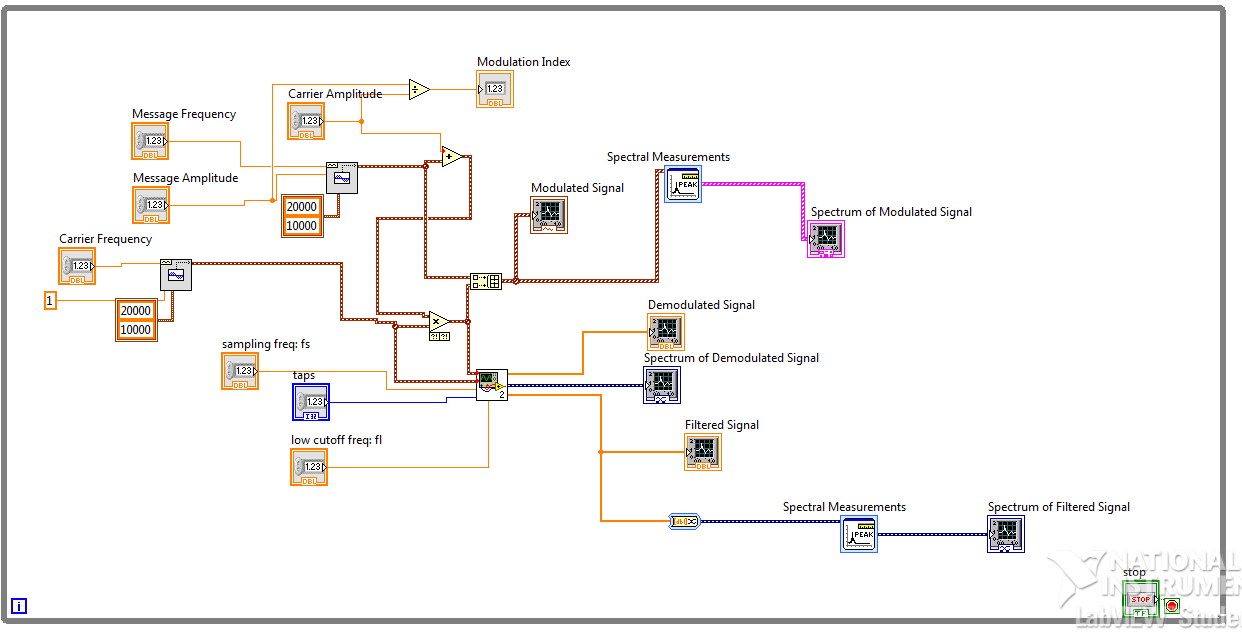
Анализ методов адаптивной фильтрации для формирования диаграмм направленности антенных решеток Чистяков В.А., студент гр.121-1, Куприц В.Ю., доцент каф. РТС Введение Процесс обнаружения объектов, определение
ПодробнееРек. МСЭ-R SA.1026-4 1 РЕКОМЕНДАЦИЯ МСЭ-R SA.1026-4 Критерии суммарных помех * для систем передачи данных (космос-земля) спутниковой службы исследования Земли и метеорологической спутниковой службы, использующих
ПодробнееРек. МСЭ-R SA.609-2 1 РЕКОМЕНДАЦИЯ МСЭ-R SA.609-2 * Критерии защиты для линий радиосвязи пилотируемых и непилотируемых исследовательских спутников **, работающих на околоземной орбите *** (1986-1992-2006)
ПодробнееДмитрий Левкин
Частотный преобразователь, или преобразователь частоты — электротехническое устройство (система управления), используемое для контроля скорости и/или момента двигателей переменного тока путем изменения частоты и напряжения питания электродвигателя.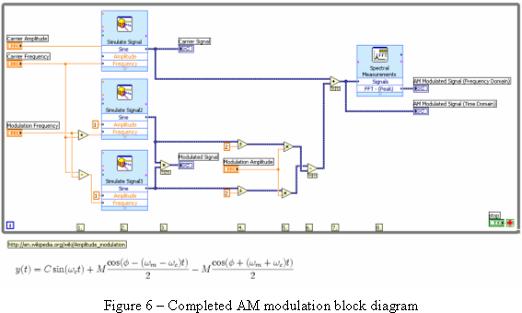
Согласно ГОСТ 23414-84 полупроводниковый преобразователь частоты — полупроводниковый преобразователь переменного тока, осуществляющий преобразование переменного тока одной частоты в переменный ток другой частоты
Частотный преобразователь — это устройство, используемое для того чтобы обеспечить непрерывное управление процессом. Обычно частотный преобразователь способен управлять скоростью и моментом асинхронных и/или синхронных двигателей.
Частотный преобразователь небольшой мощности
Высоковольтный преобразователь
Преобразователи частоты находят все более широкое применение в различных приложениях промышленности и транспорта. Благодаря развитию силовых полупроводниковых элементов, инверторы напряжения и инверторы тока с ШИМ управлением получают все более широкое распространение. Устройства, которые преобразуют постоянный сигнал в переменный, с желаемым напряжением и частотой, называются инверторами.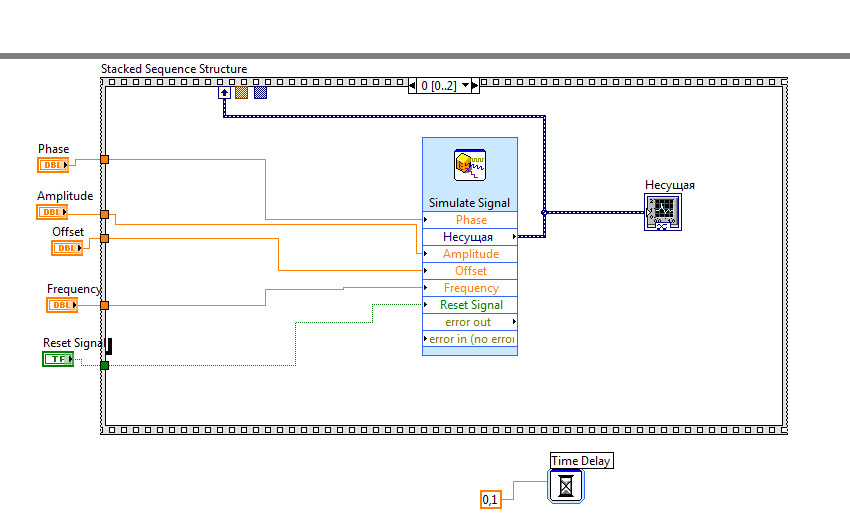 Такое преобразование может быть осуществлено с помощью электронных ключей (BJT, MOSFET, IGBT, MCT, SIT, GTO) и тиристоров в зависимости от задачи.
Такое преобразование может быть осуществлено с помощью электронных ключей (BJT, MOSFET, IGBT, MCT, SIT, GTO) и тиристоров в зависимости от задачи.
На данный момент основная часть всей производимой электрической энергии в мире используется для работы электрических двигателей. Преобразование электрической мощности в механическую мощность осуществляется с помощью электродвигателей мощностью от меньше ватта до нескольких десятков мегаватт.
Основными элементами частотного преобразователя являются силовая часть
 Современные частотные преобразователи обычно имеют модульную архитектуру, что позволяет расширять возможности устройства. Также зачастую имеется возможность установки дополнительных интерфейсных модулей и модулей расширения каналов ввода/вывода.
Современные частотные преобразователи обычно имеют модульную архитектуру, что позволяет расширять возможности устройства. Также зачастую имеется возможность установки дополнительных интерфейсных модулей и модулей расширения каналов ввода/вывода.Функциональная схема частотного преобразователя
На микроконтроллере частотного преобразователя выполняется программное обеспечение, которое управляет основными параметрами электродвигателя (скоростью и моментом). Основные методы управления бесщеточными двигателями, используемые в частотных преобразователях представлены в таблице ниже.
Характеристики основных способов управления электродвигателями используемых в частотных преобразователях [3]Примечание:
Широкое развитие силовых электрических преобразователей в последние десятилетия привело к увеличению количества исследований в области модуляции. Метод модуляции непосредственно влияет на эффективность всей энергосистемы (силовой части, системы управления), определяя экономическую выгоду и производительность конечного продукта.
Метод модуляции непосредственно влияет на эффективность всей энергосистемы (силовой части, системы управления), определяя экономическую выгоду и производительность конечного продукта.
Главная цель методов модуляции – добиться лучшей формы сигналов (напряжений и токов) с минимальными потерями. Другие второстепенные задачи управления могут быть решены посредством использования правильного способа модуляции, такие как уменьшение синфазной помехи, выравнивание постоянного напряжения, уменьшение пульсаций входного тока, снижение скорости нарастания напряжения. Одновременное достижение всех целей управления невозможно, необходим компромисс. Каждая схема силового преобразователя и каждое приложение должны быть глубоко изучены для определения наиболее подходящего метода модуляции.
Корни силовой электроники уходят к 1901 году, когда П.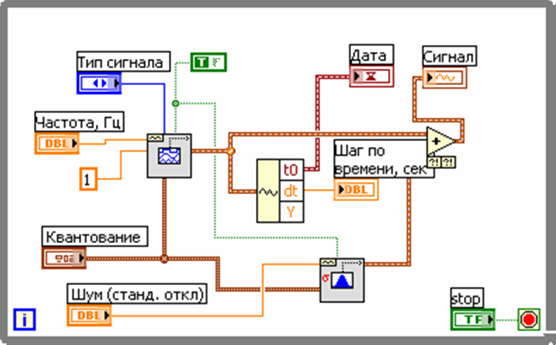 К. Хьюитт изобрел ртутный вентиль. Однако современная эра полупроводниковой силовой электроники началась с коммерческого представления управляемого кремниевого выпрямителя (тиристора) компанией General Electric в 1958 году. Затем развитие продолжалось в области новых полупроводниковых структур, материалов и в производстве, давая рынку много новых устройств с более высокой мощностью и улучшенными характеристиками. Сегодня силовая электроника строится на металл-оксид-полупроводниковых полевых транзисторах (MOSFET — metal-oxide-semiconductor field-effect transistor) и биполярных транзисторах с изолированным затвором (IGBT — Insulated-gate bipolar transistors), а для диапазона очень высоких мощностей — на тиристорах с интегрированным управлением (IGCT – Integrated gate-commutated thyristor). Также сейчас доступны интегрированные силовые модули. Новая эра высоковольтных, высокочастотных и высокотемпературных технологий открывается многообещающими полупроводниковыми устройствами, основанными на широкой запрещенной зоне карбида кремния (SiC).
К. Хьюитт изобрел ртутный вентиль. Однако современная эра полупроводниковой силовой электроники началась с коммерческого представления управляемого кремниевого выпрямителя (тиристора) компанией General Electric в 1958 году. Затем развитие продолжалось в области новых полупроводниковых структур, материалов и в производстве, давая рынку много новых устройств с более высокой мощностью и улучшенными характеристиками. Сегодня силовая электроника строится на металл-оксид-полупроводниковых полевых транзисторах (MOSFET — metal-oxide-semiconductor field-effect transistor) и биполярных транзисторах с изолированным затвором (IGBT — Insulated-gate bipolar transistors), а для диапазона очень высоких мощностей — на тиристорах с интегрированным управлением (IGCT – Integrated gate-commutated thyristor). Также сейчас доступны интегрированные силовые модули. Новая эра высоковольтных, высокочастотных и высокотемпературных технологий открывается многообещающими полупроводниковыми устройствами, основанными на широкой запрещенной зоне карбида кремния (SiC).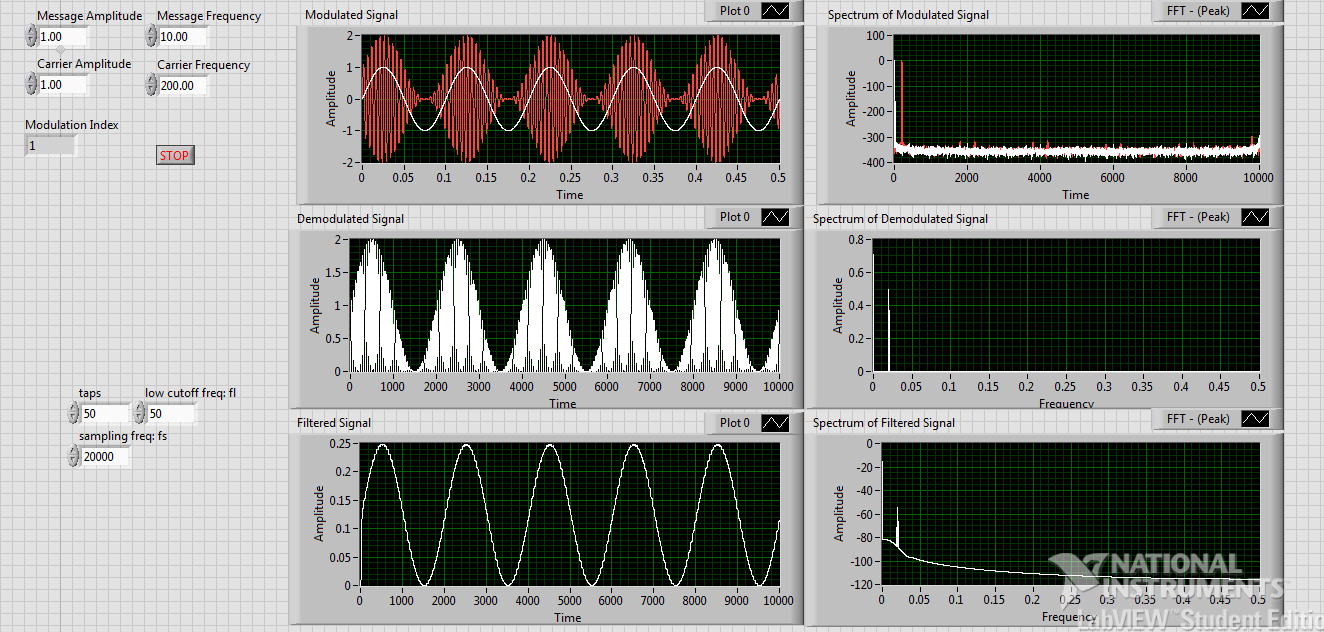
Инвертор напряжения наиболее распространен среди силовых преобразователей.
Двухуровневый инвертор напряжения (two-level voltage-source inverter) – наиболее широко применяемая топология преобразователя энергии. Он состоит из конденсатора и двух силовых полупроводниковых ключей на фазу. Управляющий сигнал для верхнего и нижнего силовых ключей связан и генерирует только два возможных состояния выходного напряжения (нагрузка соединяется с положительной или отрицательной шиной источника постоянного напряжения).
Схема двухуровневого инвертора напряжения
Фазное напряжение двухуровневого инвертора напряжения
Используя методы модуляции для генерирования управляющих импульсов возможно синтезировать выходное напряжение с желаемыми параметрами (формой, частотой, амплитудой). Из-за содержания высоких гармоник в выходном сигнале для генерирования синусоидальных токов выходной сигнал необходимо фильтровать, но так как данные преобразователи обычно имеют индуктивную нагрузку (электродвигатели) дополнительные фильтры используются только при необходимости.
Из-за содержания высоких гармоник в выходном сигнале для генерирования синусоидальных токов выходной сигнал необходимо фильтровать, но так как данные преобразователи обычно имеют индуктивную нагрузку (электродвигатели) дополнительные фильтры используются только при необходимости.
Максимальное выходное напряжение определяется значением постоянного напряжения звена постоянного тока. Для эффективного управления мощной нагрузкой требуется высокое постоянное напряжение звена постоянного тока, но на практике это напряжение ограничено максимальным рабочим напряжением полупроводников. Для примера низковольтные IGBT транзисторы обеспечивают выходное напряжение до 690 В. Для того чтобы обойти данное ограничение по напряжению в последние десятилетия были разработаны схемы многоуровневых преобразователей. Данные преобразователи сложнее, чем двухуровневые в плане топологии, модуляции и управления, но при этом имеют лучшие показатели по мощности, надежности, габаритам, производительности и эффективности.
В трехуровневом преобразователе с фиксированной нейтральной точкой (three-level neutral point clamped converter) постоянное напряжение делится поровну посредством двух конденсаторов, поэтому фаза может быть подключена к линии положительного напряжения (посредством включения двух верхних ключей), к средней точке (посредством включения двух центральных ключей) или к линии отрицательного напряжения (посредством включения двух нижних ключей). Каждому ключу в данном случае требуется блокировать только половину напряжения звена постоянного тока, тем самым позволяя увеличить мощность устройства, используя те же самые полупроводниковые ключи, как и в обычном двухуровневом преобразователе. В данном преобразователе обычно используются высоковольтные IGBT транзисторы и IGCT тиристоры.
Схема трехуровневого преобразователя с фиксированной нейтральной точкой
 Данную проблему предлагается решать путем изменения метода модуляции.
Данную проблему предлагается решать путем изменения метода модуляции.Фазное напряжение трехуровневого преобразователя с фиксированной нейтральной точкой
Преобразователь с фиксированной нейтральной точкой может масштабироваться для достижения больше чем трех уровней выходного сигнала путем деления напряжения звена постоянного тока более чем на два значения посредством конденсаторов. Каждое из этих деленных напряжений может быть подключено к нагрузке с использованием расширенного набора ключей и ограничительных диодов. Вместе с увеличением мощности преимуществами многоуровневого преобразователя является лучшее качество электроэнергии, меньшее значение скорости нарастания напряжения (dv/dt) и связанных электромагнитных помех. Однако, когда преобразователь со связанной нейтральной точкой имеет более трех уровней, появляются другие проблемы. С точки зрения схемотехники в таком случае ограничительные диоды требуют более высокое максимальное рабочее напряжение чем основные ключи, что требует использования различных технологий или нескольких ограничительных диодов соединенных последовательно. В дополнение становится критическим неравномерное использование силовых элементов в схеме. В итоге из-за увеличения количества элементов снижается надежность. Приведенные недостатки ограничивают использование преобразователей с фиксированной нейтральной точкой с более чем тремя уровнями в промышленных приложениях.
Вместе с увеличением мощности преимуществами многоуровневого преобразователя является лучшее качество электроэнергии, меньшее значение скорости нарастания напряжения (dv/dt) и связанных электромагнитных помех. Однако, когда преобразователь со связанной нейтральной точкой имеет более трех уровней, появляются другие проблемы. С точки зрения схемотехники в таком случае ограничительные диоды требуют более высокое максимальное рабочее напряжение чем основные ключи, что требует использования различных технологий или нескольких ограничительных диодов соединенных последовательно. В дополнение становится критическим неравномерное использование силовых элементов в схеме. В итоге из-за увеличения количества элементов снижается надежность. Приведенные недостатки ограничивают использование преобразователей с фиксированной нейтральной точкой с более чем тремя уровнями в промышленных приложениях.
Каскадные преобразователи основанные на модульных силовых ячейках со схемой H-мост (cascaded H-bridge — CHB) и преобразователи с плавающими конденсаторами (flying capacitor converter) были предложены для обеспечения большего количества уровней выходного напряжения в сравнении с преобразователями с фиксированной нейтральной точкой.
Каскадный преобразователь — высоко модульный преобразователь, состоящий из нескольких однофазных инверторов, обычно называемыми силовыми ячейками, соединенными последовательно для формирования фазы. Каждая силовая ячейка выполнена на стандартных низковольтных компонентах, что обеспечивает их легкую и дешевую замену в случае выхода из строя.
Схема каскадного преобразователя
Основным преимуществом данного преобразователя является использование только низковольтных компонентов, при этом он дает возможность управлять мощной нагрузкой среднего диапазона напряжения. Несмотря на то что частота коммутации в каждой ячейке низкая, эквивалентная частота коммутации приложенная к нагрузке – высокая, что уменьшает потери на переключение ключей, дает низкую скорость нарастания напряжения (dv/dt) и помогает избежать резонансов.
Фазное напряжение каскадного преобразователя
Выходное напряжение преобразователя с плавающими конденсаторами получается путем прямого соединения выхода фазы с положительной, отрицательной шиной или подключением через конденсаторы. Количество уровней выходных напряжений зависит от количества навесных конденсаторов и отношения между различными напряжениями.
Количество уровней выходных напряжений зависит от количества навесных конденсаторов и отношения между различными напряжениями.
Схема преобразователя с плавающими конденсаторами
Этот преобразователь, как и в случае каскадного преобразователя, также имеет модульную топологию, где каждая ячейка состоит из конденсатора и двух связанных ключей. Однако, в отличие от каскадного преобразователя добавление дополнительных силовых ключей к конденсаторному преобразователю не увеличивает номинальную мощность преобразователя, а только уменьшает скорость нарастания напряжения (dv/dt), улучшая коэффициент гармоник выходного сигнала. Как и у каскадного преобразователя, модульность уменьшает стоимость замены элементов, облегчает поддержку и позволяет реализовать отказоустойчивую работу.
Фазное напряжение преобразователя с плавающими конденсаторами
Конденсаторный преобразователь требует только один источник постоянного тока для питания всех ячеек и фаз.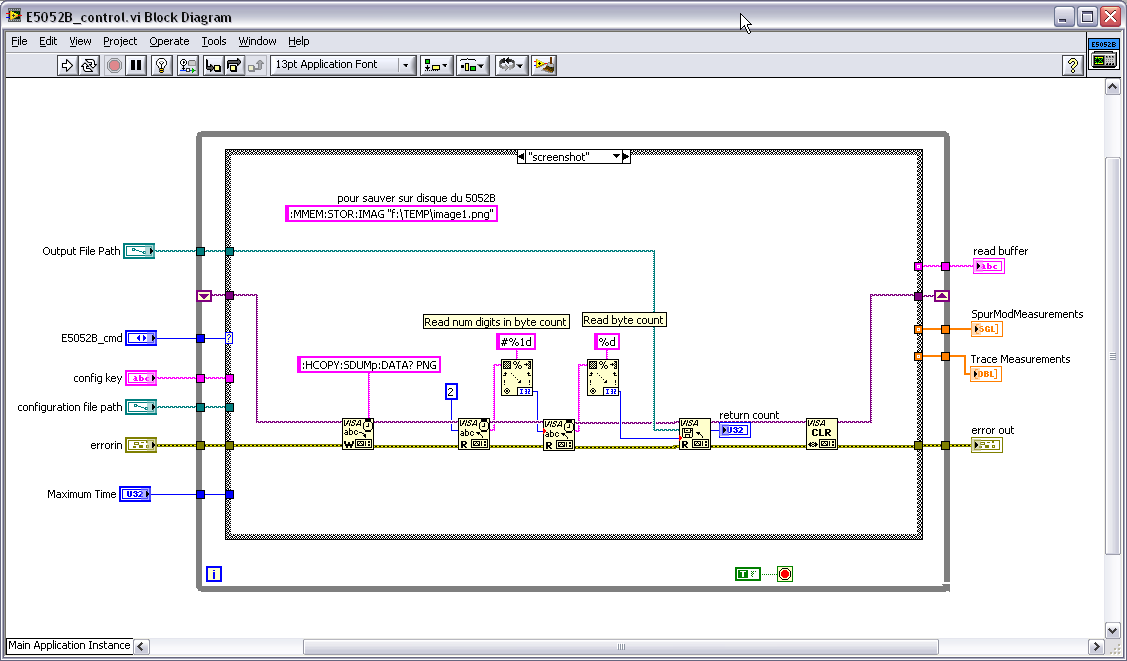 Поэтому, можно обойтись без входного трансформатора, а количество ячеек может быть произвольно увеличено в зависимости от требуемой выходной мощности. Подобно преобразователю с фиксированной нейтральной точкой, этому преобразователю требуется специальный алгоритм управления для регулирования напряжения на конденсаторах.
Поэтому, можно обойтись без входного трансформатора, а количество ячеек может быть произвольно увеличено в зависимости от требуемой выходной мощности. Подобно преобразователю с фиксированной нейтральной точкой, этому преобразователю требуется специальный алгоритм управления для регулирования напряжения на конденсаторах.
Для работы инвертору тока всегда требуется управляемый выпрямитель, чтобы обеспечить постоянный ток в звене постоянного тока. В стандартной топологии обычно используются тиристорные выпрямители. Чтобы уменьшить помехи в нагрузке, в звене постоянного тока используется расщепленная индуктивность. Инвертор тока имеет схему силовых ключей наподобие инвертора напряжения, но в качестве силовых ключей используются тиристоры с интегрированным управлением (IGCT). Выходной ток имеет форму ШИМ и не может быть напрямую приложен к индуктивной нагрузке (электродвигателю), поэтому инвертор тока обязательно включает выходной емкостной фильтр, который сглаживает ток и выдает гладкое напряжение на нагрузку. Этот преобразователь может быть реализован для работы на средних напряжениях и более того он по природе имеет возможность рекуперации энергии.
Этот преобразователь может быть реализован для работы на средних напряжениях и более того он по природе имеет возможность рекуперации энергии.
Схема инвертора тока с выпрямителем
Прямые преобразователи передают энергию прямо от входа к выходу без использования элементов накопления энергии. Основным преимуществом таких преобразователей является меньшие габариты. Недостатком – необходимость более сложной схемы управления.
Циклоконвертер относится к категории прямых преобразователей. Данный преобразователь широко использовался в приложениях требующих высокую мощность. Этот конвертер состоит из двойных тиристорных преобразователей на фазу, который может генерировать изменяемое постоянное напряжение, контролируемое таким образом, чтобы следовать опорному синусоидальному сигналу. Вход каждого преобразователя питается от фозосмещающего трансформатора, где устраняются гармоники входного тока низкого порядка.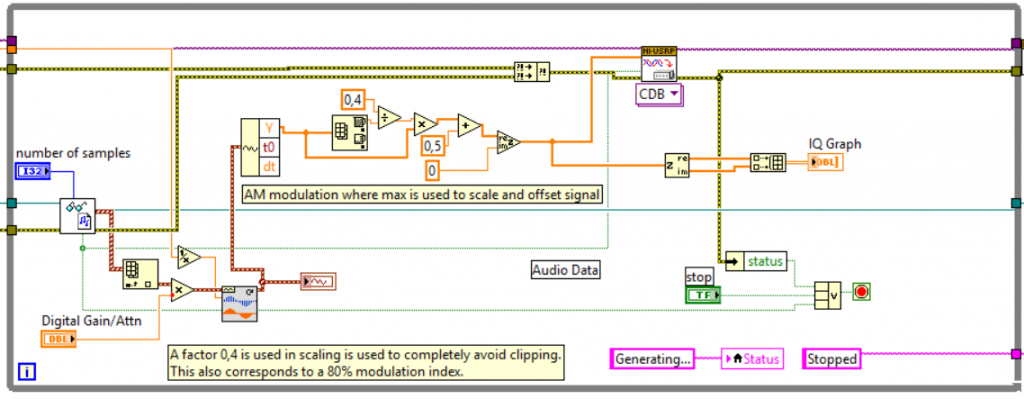 Выходное напряжение является результатом комбинации сегментов входного напряжения в котором основная гармоника следует за опорным сигналом. По своей природе данный преобразователь хорошо подходит для управления низкочастотными мощными нагрузками.
Выходное напряжение является результатом комбинации сегментов входного напряжения в котором основная гармоника следует за опорным сигналом. По своей природе данный преобразователь хорошо подходит для управления низкочастотными мощными нагрузками.
Схема циклоконвертера
Матричный преобразователь в его прямой и непрямой версии также принадлежит к категории прямых преобразователей. Основной принцип работы прямого матричного преобразователя (direct matrix converter) — возможность соединения выходной фазы к любому из входных напряжений. Преобразователь состоит из девяти двунаправленных ключей, которые могут соединить любую входную фазу с любой выходной фазой, позволяя току течь в обоих направлениях. Для улучшения входного тока требуется индуктивно-емкостной фильтр второго порядка. Выход напрямую соединяется с индуктивной нагрузкой. Не все доступные комбинации ключей возможны, они ограничены только 27 правильными состояниями коммутации. Как говорилось ранее, основное преимущество матричных преобразователей — меньшие габариты, что важно для автомобильных и авиационных приложений.
Как говорилось ранее, основное преимущество матричных преобразователей — меньшие габариты, что важно для автомобильных и авиационных приложений.
Схема прямого матричного преобразователя
Непрямой матричный преобразователь (indirect matrix converter) состоит из двунаправленного трехфазного выпрямителя, виртуального звена постоянного тока и трехфазного инвертора. Количество силовых полупроводников такое же как у прямых матричных преобразователей (если двунаправленный ключ рассматривается как два однонаправленных ключа), но количество возможных состояний включения отличается. Используя ту же самую конфигурацию непрямого матричного преобразователя, возможно упростить его топологию и уменьшить количество элементов ограничив его работу от положительного напряжения в виртуальном звене постоянного тока. Уменьшенная топология называется разреженный матричный преобразователь (sparse matrix converter).
Схема непрямого матричного преобразователя
Схема разреженного матричного преобразователя
 Термины и определения.
Термины и определения.
В процессе разработки квантовых компьютеров, на этапе тестирования требуются многоканальные генераторы от 40 ГГц с возможностью выполнить импульсную модуляцию в широкой полосе частот. Для создания таких специализированных тестовых систем прекрасно подходят аналоговые и векторные многоканальные генераторы сигналов AnaPico серий MCSG-Х и RFSVG-X.
Существенным преимуществом многоканальных генераторов сигналов AnaPico MCSG6, MCSG12, MCSG20, MCSG40 является возможность масштабирования системы до 200 и более каналов, с сохранением показателя ошибки по фазе не более 5 млрд.
Точность установки фазы между каналами 5 млрд
Для тестирования квантовых компьютеров от производителей ВЧ-СВЧ генераторов требуются многоканальное решение с IQ модуляцией или сигналы несущей в полосе частоте до 18 ГГц и реже до 40 ГГц, количеством каналов в среднем до 24 и более. Существует 3 базовых подхода для построения такой тестовой системы:
Использовать один генератор и с помощью разветвителей добиться многоканальности, фазовой когерентности. Плюсы такого решения — низкая стоимость, неплохая фазовая когерентность для небольшого числа каналов. Минусы — недостаточная когерентность для многих задач. С ростом числа каналов требуются дополнительные усилители, фазовращатели и функциональная система станет громоздкой и дорогой. К сожалению, невозможно управлять сигналом в отдельном канале.
С ростом числа каналов требуются дополнительные усилители, фазовращатели и функциональная система станет громоздкой и дорогой. К сожалению, невозможно управлять сигналом в отдельном канале.
Использование аналоговых фазово-когерентных генераторов (например, AnaPico серии MCSG-X в качестве гетеродина) и отдельных генераторов AWG, внешних IQ модуляторов. Благодаря относительно высокой выходной мощности, отличной фазовой согласованности каналов и небольшому размеру, такое решение на основе многоканальных генераторов AnaPico серии MCSG было широко принято сегодняшними клиентами.
Фазово-когерентные многоканальные векторные генераторы сигналов (например, AnaPico серии RFVSG-X).
Таким образом, среди 3-х возможных вариантов решений для тестирования квантовых компьютеров генераторы сигналов AnaPico серий MCSG-X и RFVSG-X успешно могут быть применены в двух вариантах и не имеют аналогов в классе.
Многоканальные генераторы Anapico серии MCSG-X и RFSVG-X прекрасно подходят под задачи создания тестовых систем квантовых компьютеров. Генераторы данных серий можно объединять в системы из 40-60 и более каналов, с точностью установки фазы 5 млрд.
Серия MCSG-X — это аналоговые многоканальные фазово-когерентные генераторы сигналов с низким фазовым шумом и настройкой фазы с разрешением 0.01°, которые идеально себя зарекомендовали в качестве гетеродинов в системе для тестирования Q-битов.
Серия RFVSG-X (доступны к заказу с 2021 года) — это векторные генераторы сигналов, которые выполняют функционал MCSG-X, но дополнительно обладают встроенным генератором произвольной формы, IQ модуляцией, последовательным запуском и воспроизведением сценариев IQ cсигналов из внутренней памяти и быстрым переключением между сценариями по запуску через FCP порт.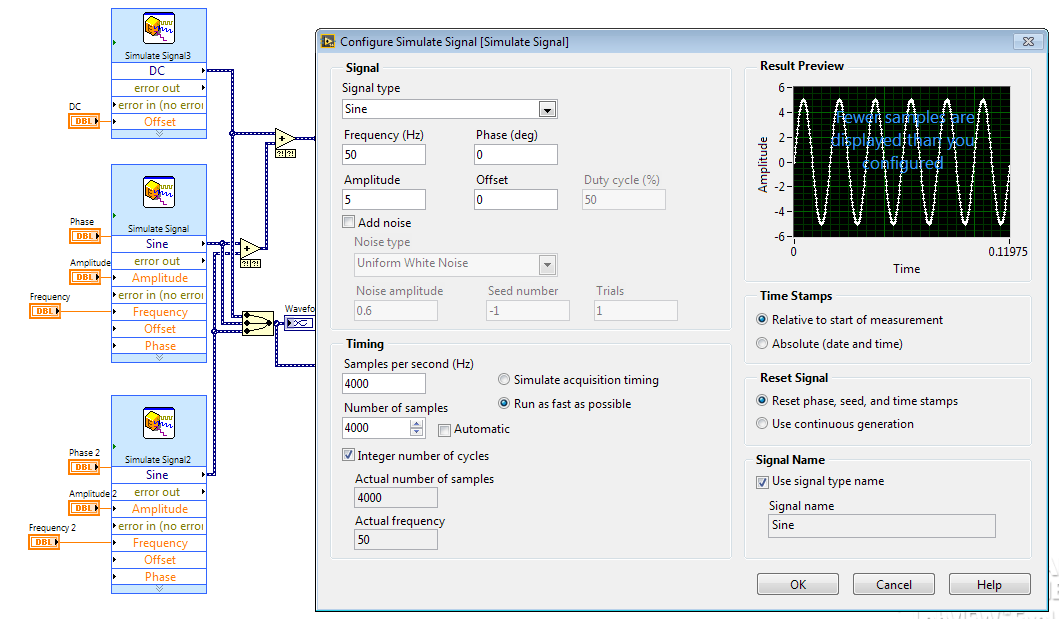
Серия многоканальных генераторов сигналов MCSG-X предлагает до 4-х фазово-когерентных, сверхбыстрых источников сигналов с очень низким фазовым шумом в одном устройстве. Диапазон частот от 300 кГц до 6, 12, 20, 33 или 40 ГГц. Выходная мощность колеблется от -80 дБм до +25 дБм. Каналы могут быть независимо запрограммированы по частоте, фазе и амплитуде. Возможность импульсной модуляции включена на всех устройствах, тогда как амплитудная, частотная и фазовая модуляция могут быть добавлены по желанию.
Отличительной особенностью серии также является превосходный фазовый шум в сочетании с хорошим паразитным и гармоническим подавлением и передовой скоростью переключения 25 мкс с опцией FS. Также высокостабильный эталон OCXO обеспечивает превосходную точность и стабильность частоты.
Генераторы MCSG-X поставляются в стандартном корпусе 19”1U и имеют интерфейсы управления USB, LAN, GPIB). Каждый интерфейс обеспечивает простую и быструю связь с использованием набора команд SCPI 1999. Дистанционное управление прибором быстро достигается с любой хост-системы. Интерфейс прикладного программирования (API) и примеры программирования для Matlab, Labview, C ++ и др. позволяют быстро и просто осуществлять тестирование.
Каждый интерфейс обеспечивает простую и быструю связь с использованием набора команд SCPI 1999. Дистанционное управление прибором быстро достигается с любой хост-системы. Интерфейс прикладного программирования (API) и примеры программирования для Matlab, Labview, C ++ и др. позволяют быстро и просто осуществлять тестирование.
Компания AnaPico (Швейцария) является одним из лидеров в области создания недорогих и качественных решений по многоканальной генерации. Многоканальные генераторы AnaPico, благодаря наличию фазовой-когерентности выходов и возможности масштабирования системы до 200 и более каналов являются востребованным оборудованием в такой стремительно развивающейся специализированной отрасли, как разработка квантовых компьютеров.
Сегодня, для выполнения таких задач тестирования, многоканальные генераторы сигналов AnaPico уже используются такими известными лабораториями по разработке квантовых компьютеров, как: IBM, Google, Oxford Quantum, University of Innsbruck, Qinghua University, Beijing University, Zhejiang University, China Academy of Science, Tokyo University of Science, Nagoya University, RIKEN, NTT, AIST.
Оборудование AnaPico вы можете приобрести в нашей компании по выгодной цене. Наши специалисты всегда готовы проконсультировать и подобрать для Вас необходимые приборы. Для заказа отправляйте заявки на e-mail: [email protected] или позвоните +7 495 204 13 17.
Посмотрите видео, показывающие все возможности многоканальных генераторов сигналов Anapico: фазово-когерентной перестройки частоты, сигналов с памятью фазы, фазово-согласованных выходов генератора.
 youtube.com/embed/rHQ8wvIOCfY» frameborder=»0″ allow=»accelerometer; autoplay; clipboard-write; encrypted-media; gyroscope; picture-in-picture» allowfullscreen=»»/>
youtube.com/embed/rHQ8wvIOCfY» frameborder=»0″ allow=»accelerometer; autoplay; clipboard-write; encrypted-media; gyroscope; picture-in-picture» allowfullscreen=»»/>HART-протокол (Highway Addressable
Remote Transducer — «магистральный адресуемый удаленный преобразователь»)
[HART]
является открытым стандартом на метод
сетевого обмена, который включает в себя не только протокол взаимодействия
устройств, но и требования к аппаратуре канала связи, поэтому устоявшийся
термин «протокол», означающий алгоритм взаимодействия устройств,
применен здесь не совсем корректно. Стандарт HART был разработан в 1980 году фирмой Rosemount Inc., которая позже сделала его
открытым. В настоящее время стандарт поддерживается международной организацией HART Communication Foundation
(HCF), насчитывающей 190 членов (на
декабрь 2006 г.). HART находит применение для связи контроллера с датчиками и
измерительными преобразователями, электромагнитными клапанами, локальными
контроллерами, для связи с искробезопасным оборудованием.
Несмотря на свое низкое быстродействие (1200 бит/с) и ненадежный аналоговый способ передачи данных, а также появление более совершенных сетевых технологий, устройства с HART-протоколом разрабатываются до сих пор и объем этого сегмента рынка продолжает расти. Однако применение HART в России довольно ограничено, поскольку внедрение датчиков с HART-протоколом требует одновременного применения HART-совместимых контроллеров и специализированного программного обеспечения. Типовой областью применение HART являются достаточно дорогие интеллектуальные устройства (электромагнитные клапаны, датчики потока жидкости, радарные уровнемеры и т. п), а также взрывобезопасное оборудование, где низкая мощность HARTсигнала позволяет легко удовлетворить требованиям стандартов на искробезопасные электрические цепи.
Стандарт HART включает
в себя 1-й, 2-й и 7-й уровни модели OSI
(табл. 2.4).
Полное описание стандарта можно купить в организации HCF.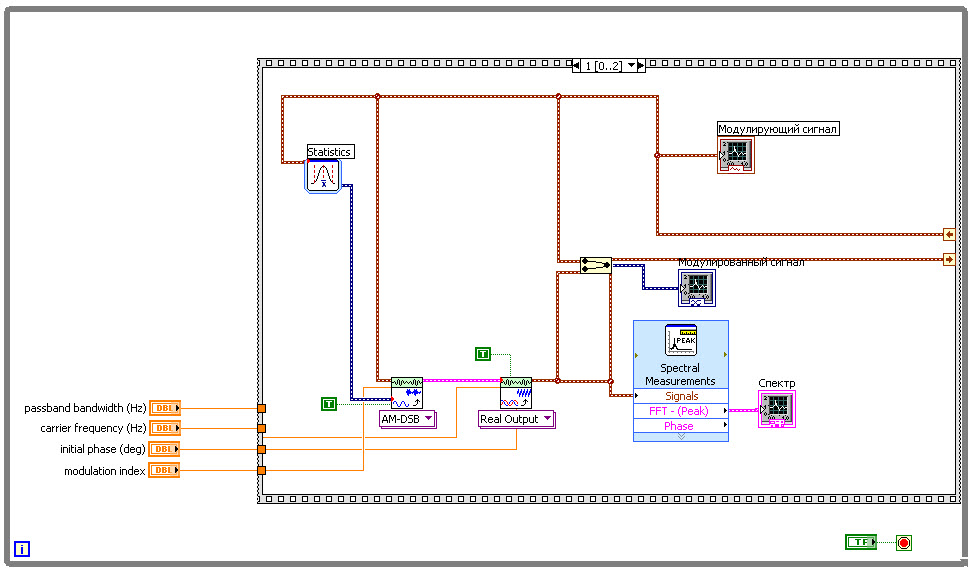
|
Табл. 2.4. Модель OSI HART-протокола |
||
|
Номер уровня |
Название уровня |
HART |
|
7 |
Прикладной |
HART-команды, ответы, типы данных |
|
6 |
Уровень представления |
Нет |
|
5 |
Сеансовый |
Нет |
|
4 |
Транспортный |
Нет |
|
3 |
Сетевой |
Нет |
|
2 |
Канальный (передачи данных) |
Ведущий/ведомый, контрольная сумма,
контроль четности, организация потока битов в сообщение, контроль приема
сообщений. |
|
1 |
Физический |
Наложение цифрового ЧМ сигнала на аналоговый 4-20 мА; медная витая пара |
|
|
|
Рис. 2.15. Суммирование аналогового и цифрового сигнала в HART-протоколе |
При создании HART-протокола в 1980 году преследовалась
цель сделать его совместимым с широко распространенным в то время стандартом
«токовая петля», но добавить возможности, необходимые для управления
интеллектуальными устройствами. Поэтому аналоговая «токовая петля»
4…20 мА была модернизирована таким образом, что получила возможность
полудуплексного цифрового обмена данными.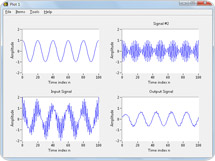 Для этого аналоговый сигнал суммируется
с цифровым сигналом
(рис. 2.15) и
полученная таким образом сумма передается с помощью источника тока 4…20 мА по
линии связи. Благодаря сильному различию диапазонов частот аналогового (0…10
Гц) и цифрового (1200 Гц и 2200 Гц) сигналов они легко могут быть разделены
фильтрами низких и высоких частот в приемом устройстве. При передаче цифрового
двоичного сигнала логическая единица кодируется синусоидальным сигналом с
частотой 1200 Гц, ноль — 2200 Гц. При смене частоты фаза колебаний остается
непрерывной. Такой способ формирования сигнала называется частотной
манипуляцией с непрерывной фазой. Выбор частот соответствует американскому
стандарту BELL 202 на
телефонные каналы связи.
Для этого аналоговый сигнал суммируется
с цифровым сигналом
(рис. 2.15) и
полученная таким образом сумма передается с помощью источника тока 4…20 мА по
линии связи. Благодаря сильному различию диапазонов частот аналогового (0…10
Гц) и цифрового (1200 Гц и 2200 Гц) сигналов они легко могут быть разделены
фильтрами низких и высоких частот в приемом устройстве. При передаче цифрового
двоичного сигнала логическая единица кодируется синусоидальным сигналом с
частотой 1200 Гц, ноль — 2200 Гц. При смене частоты фаза колебаний остается
непрерывной. Такой способ формирования сигнала называется частотной
манипуляцией с непрерывной фазой. Выбор частот соответствует американскому
стандарту BELL 202 на
телефонные каналы связи.
Принцип взаимодействия устройств на
физическом уровне модели OSI
показан на
рис. 2.16.
Сопротивление
выбирается так же, как и в токовой
петле (стандартом предусмотрена величина 230. ..1100 Ом) и служит для
преобразования тока 4…20 мА в напряжение. Акт взаимодействия устройств
инициирует контроллер. Цифровой сигнал от источника напряжения через конденсатор
подается
в линию передачи и принимается на стороне датчика в форме напряжения в
диапазоне от 400 до 800 мВ. Приемник датчика воспринимает HART-сигналы в
диапазоне от 120 мВ до 2 В, сигналы от 0 до 80 мВ приемником игнорируются.
Получив запрос, датчик формирует ответ, который в общем случае может содержать
как аналоговый сигнал , так и цифровой (). Аналоговый сигнал
обычно содержит информацию об измеренной величине, а цифровой — информацию о
единицах и диапазоне измерения, о выходе величины за границы динамического диапазона,
о типе датчика, имени изготовителя и т. п.). Аналоговый и цифровой сигнал суммируются
и подаются в линию связи в форме тока
(рис. 2.15,
рис. 2.16). На
стороне контроллера ток преобразуется в напряжение резистором .
..1100 Ом) и служит для
преобразования тока 4…20 мА в напряжение. Акт взаимодействия устройств
инициирует контроллер. Цифровой сигнал от источника напряжения через конденсатор
подается
в линию передачи и принимается на стороне датчика в форме напряжения в
диапазоне от 400 до 800 мВ. Приемник датчика воспринимает HART-сигналы в
диапазоне от 120 мВ до 2 В, сигналы от 0 до 80 мВ приемником игнорируются.
Получив запрос, датчик формирует ответ, который в общем случае может содержать
как аналоговый сигнал , так и цифровой (). Аналоговый сигнал
обычно содержит информацию об измеренной величине, а цифровой — информацию о
единицах и диапазоне измерения, о выходе величины за границы динамического диапазона,
о типе датчика, имени изготовителя и т. п.). Аналоговый и цифровой сигнал суммируются
и подаются в линию связи в форме тока
(рис. 2.15,
рис. 2.16). На
стороне контроллера ток преобразуется в напряжение резистором . Полученный сигнал подается на фильтр нижних частот с частотой среза 10 Гц и на
фильтр верхних частот с частотой среза 400…800 Гц. На выходе фильтров
выделяются цифровой сигнал и аналоговый . При использовании
фильтров второго порядка погрешность, вносимая цифровым сигналом в аналоговый,
составляет всего 0,01% от 20 мА.
Полученный сигнал подается на фильтр нижних частот с частотой среза 10 Гц и на
фильтр верхних частот с частотой среза 400…800 Гц. На выходе фильтров
выделяются цифровой сигнал и аналоговый . При использовании
фильтров второго порядка погрешность, вносимая цифровым сигналом в аналоговый,
составляет всего 0,01% от 20 мА.
Как и в обычной «токовой петле», источник тока в HART-устройстве может иметь внешний или встроенный источник питания.
|
Рис. 2.16. Принцип работы HART-протокола на физическом уровне |
В частном случае HART-протокол может использовать только цифровой сигнал, без аналогового, или только аналоговый сигнал 4…20 мА, без цифрового.
В случае, когда ведомым устройством
является не датчик, а исполнительное устройство (например электромагнитный
клапан), аналоговый сигнал в форме тока должен передаваться от ведущего устройства
к ведомому и источник тока должен находиться в ведущем устройстве (ситуация,
обратная показанной на рис.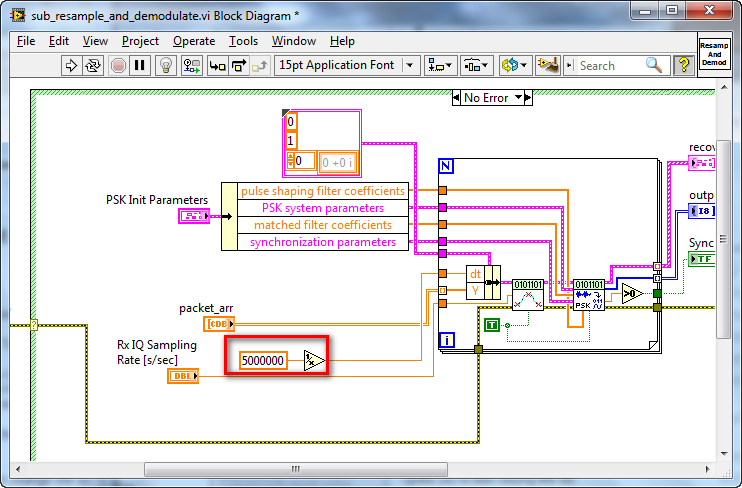 2.16).
Поскольку HART устройства
содержат микроконтроллер и МОП-ключи, необходимое для этого переконфигурирование
передатчика и приемника выполняется путем подачи соответствующей команды.
2.16).
Поскольку HART устройства
содержат микроконтроллер и МОП-ключи, необходимое для этого переконфигурирование
передатчика и приемника выполняется путем подачи соответствующей команды.
HART-устройства
всегда содержат микроконтроллер
(рис. 2.17)
с UART и ППЗУ (перепрограммируемое
постоянное запоминающее устройство). Цифровой сигнал, сформированный микроконтроллером,
преобразуется в UART в непрерывную последовательность бит, состоящую из двоичных
слов длиной 11 бит каждое
(рис. 2.18-а). Каждое слово начинается со стартового бита (логический ноль), за которым
следует байт передаваемых данных, затем бит паритета и стоповый бит.
Сформированная таким образом последовательность нулей и единиц передается в
модем, выполняющий частотную манипуляцию (ЧМ). Полученный частотно-манипулированный
сигнал передается в интерфейсный блок для формирования напряжения, подаваемого
в линию связи (напомним, что от контроллера к датчику передается сигнал в форме
напряжения, а обратно — в форме тока).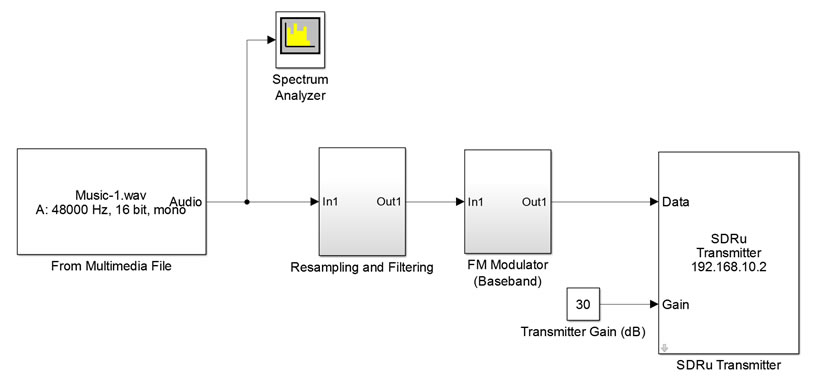
|
Рис. 2.17. Прохождение аналоговых и цифровых сигналов через устройства с HART-протоколом |
|
HART_формат_слова.tif а) |
|
б) |
|
Рис. 2.18. Структура слова (а) и сообщения (б) в HART-протоколе |
На стороне датчика сигнал
принимается из линии интерфейсным блоком, преобразуется ЧМ модемом в
последовательность битов, из которой контроллер выделяет байты данных и биты
паритета. Микроконтроллер проверяет соответствие бита паритета переданному
байту для каждого переданного слова, пока не обнаружит признак конца сообщения.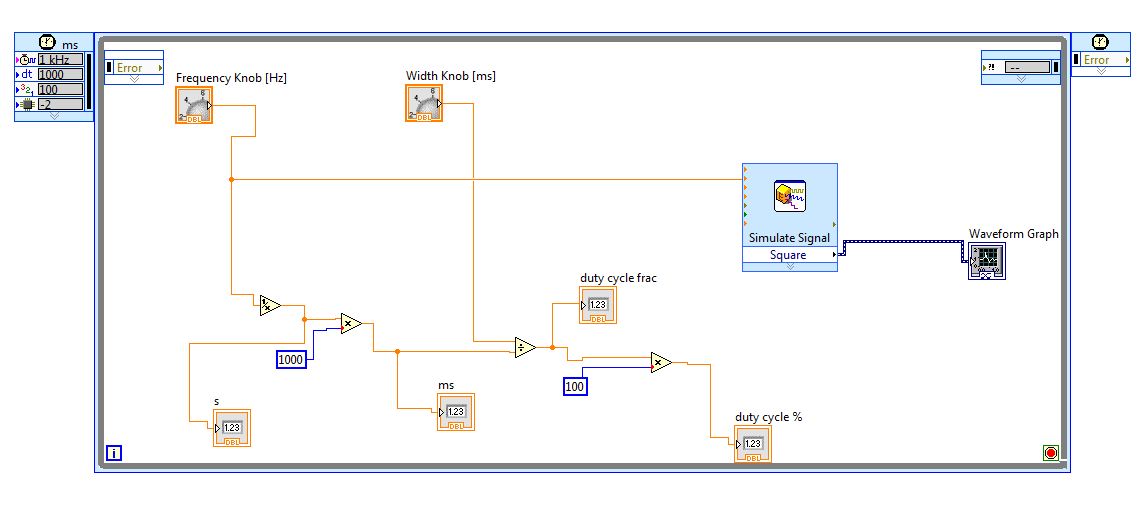
Получив команду, контроллер приступает к ее выполнению. Если пришла команда запроса измеренных данных, контроллер датчика принимает через АЦП сигнал датчика, преобразует его в аналоговую форму с помощью ЦАП, суммирует со служебной информацией на выходе ЧМ модема и передает в линию связи в форме тока 4…20 мА (рис. 2.17).
Описанный выше обмен информацией
между двумя устройствами (типа «точка-точка») является наиболее
типичным применением HART-протокола.
Однако HART-устройства
могут быть объединены в сеть. Для этого используют только цифровую часть HART-протокола, без аналоговой, а
информация передается в форме напряжения, что позволяет соединять HART-устройства параллельно. Максимальное
количество устройств в сети может составлять 15, если не использовать HART-повторители (ретрансляторы,
репитеры). HART-сеть
может иметь произвольную топологию, поскольку при малых скоростях передачи
(1200 бит/с) эффектов, характерных для длинных линий, не возникает. Этим же
объясняются крайне низкие требования к полосе пропускания кабеля (2,5 кГц по
уровню — 3 дБ). Такой полосе соответствует постоянная времени линии передачи
65 мкс, т.е. при сопротивлении линии 250 Ом ее емкость может достигать
0,26 мкФ, что соответствует длине кабеля около 2…3 км
(табл. 2.5).
Этим же
объясняются крайне низкие требования к полосе пропускания кабеля (2,5 кГц по
уровню — 3 дБ). Такой полосе соответствует постоянная времени линии передачи
65 мкс, т.е. при сопротивлении линии 250 Ом ее емкость может достигать
0,26 мкФ, что соответствует длине кабеля около 2…3 км
(табл. 2.5).
|
Табл. 2.5. Зависимость длины кабеля от погонной емкости |
||||
|
Количество устройств в сети |
Длина кабеля при погонной емкости |
|||
|
65 пФ/м |
95 пФ/м |
160 пФ/м |
225 пФ/м |
|
|
1 |
2800 м |
2000 м |
1300 м |
1000 м |
|
5 |
2500 м |
1800 м |
1150 м |
900 м |
|
10 |
2100 м |
1600 м |
1000 м |
750 м |
|
15 |
1800 м |
1400 м |
900 м |
700 м |
В сети могут быть два ведущих
устройства, одним из которых является контроллер, вторым — ручной коммуникатор,
используемый для считывания показаний и установки параметров HART-устройств. Коммуникатор может
быть подключен в любом месте сети, но обычно доступными являются только клеммы
датчиков или коммутационные клеммы в монтажном шкафу.
Коммуникатор может
быть подключен в любом месте сети, но обычно доступными являются только клеммы
датчиков или коммутационные клеммы в монтажном шкафу.
Сеть допускает горячую замену или добавление новых устройств (т.е. без отключения питания). В случае сбоя, например, при случайном коротком замыкании, сеть повторяет невыполненные операции обмена.
В HART-сети только один узел может посылать сигнал, в это время остальные «слушают» линию. Инициирует процедуру обмена ведущее устройство (контроллер или ручной коммуникатор). Ведомые получают команду и посылают ответ на нее. Каждое ведомое устройство имеет персональный сетевой адрес, который включается в сообщение ведущего устройства. Адрес имеет длину 4 бита («короткий адрес») или 38 бит («длинный адрес»). Имеется также второй способ адресации — с помощью тегов (идентификаторов, назначаемых пользователем).
Каждая команда или ответ на нее
называются сообщением и имеют длину от 10. .. 12 байт до 20…30 байт. Сообщение
начинается с преамбулы и заканчивается контрольной суммой
(рис. 2.18).
Элементы сообщения (слова) перечислены в
табл. 2.6.
|
Табл. 2.6. Значения слов в HART-сообщении |
|||
|
Обозначение |
Название |
Длина в байтах |
Назначение |
|
PA |
Преамбула |
5…20 |
Синхронизация и обнаружение несущей |
|
SD |
Признак старта |
1 |
Указывает формат сообщения и источник сообщения |
|
AD |
Адрес |
1 байт или 38 бит |
Указывает адреса обоих устройств |
|
CD |
Команда |
1 |
Сообщает подчиненному, что нужно сделать |
|
BC |
Количество байт в DT |
1 |
Показывает количество байт между BC и CHK |
|
ST |
Статус |
0 если ведущий 2 если ведомый |
Сообщает ошибки обмена данными, состояние устройства |
|
DT |
Данные |
0. |
Аргумент, соответствующий команде CD |
|
CHK |
Контрольная сумма |
1 |
Обнаружение ошибок |
Преамбула представляет собой
последовательность единиц и предназначена для синхронизации приемника с
передатчиком. Длина преамбулы зависит от требований ведомого устройства. Когда
ведущее устройство выполняет обмен с ведомым первый раз, оно посылает
максимально длинную преамбулу, чтобы обеспечить надежную синхронизацию. В
ответе ведомого содержится требование к длине преамбулы. Эта длина сохраняется
в памяти ведущего устройства и используется в последующих сообщениях. Поскольку
различные ведомые могут иметь различные требования к преамбулам, ведущий
формирует в своей памяти таблицу преамбул. В настоящее время все новые
устройства имеют преамбулу длиной 5 байт.
Ведомое устройство может быть защищено от записи. Обычно это выполняется с помощью переключателя на плате.
Контрольная сумма используется для обнаружения ошибок в данных. Если ошибка обнаружена, обычно выполняется повторный обмен сообщениями.
Ведомое устройство может иметь
режим ускоренной передачи («burst mode»), при котором оно
периодически посылает ответ на ранее принятую команду, хотя ведущий не посылает
ее повторно. Это сделано для увеличения частоты получения значений измеряемой
величины от датчика (до 3…4 раз в секунду
[HART])
в случае необходимости. Только одно устройство может находиться в таком режиме (его
еще называют монопольным), поскольку линия передачи оказывается занята. После
выключения и повторного включения питания ведомое устройство остается в
монопольном режиме и перевести его в обычный режим можно только командами с
номерами 107, 108, 109, которые посылают в паузах между периодическими ответами
ведомого устройства.
Сеть на основе HART-протокола может подключаться к другим сетям (Modbus, Profibus, Ethernet) с помощью соответствующих шлюзов. В сети также широко используются мультиплексоры, позволяющие подключить к одному контроллеру несколько HART-сетей и одновременно выполнить роль шлюза. Для подключения сети или HART-устройства к компьютеру необходим специальный HART-интерфейс, который выпускается рядом производителей. Программный доступ SCADA к HART-устройствам выполняется с помощью HART OPC сервера.
Каждое HART-устройство должно иметь уникальный адрес. Посылаемые ведущим устройством адреса декодируются одновременно всеми устройствами, находящимися в сети. Однако отвечает только то устройство, чей адрес совпадает с принятым.
Метод адресации в HART протоколе
содержит несколько потенциальных проблем. Стандартом предусмотрено два вида адресов:
короткий адрес (длиной 4 бита) и длинный адрес (длиной 38 бит). В настоящее
время используется комбинация короткого и длинного адреса. Длинный адрес устанавливается
изготовителем HART-устройства
и не может быть изменен пользователем.
В настоящее
время используется комбинация короткого и длинного адреса. Длинный адрес устанавливается
изготовителем HART-устройства
и не может быть изменен пользователем.
Когда новое устройство подключено к сети, возникает проблема, как узнать его длинный адрес, поскольку для того, чтобы считать из памяти HART устройства его адрес, к нему надо сначала обратиться, а обращение уже требует знания адреса. Перебрать все адреса невозможно, т. к. их очень много (). Проблема решается применением команды с номером 0, которая использует короткий адрес для обращения к устройству и позволяет считать из него длинный адрес.
Обычно перед монтажом сети сначала считывают длинные адреса всех устройств и составляют их базу данных, и только после этого строят сеть.
Существует второй способ узнать
длинный адрес устройства — с помощью команды с номером 11, которая обращается к
устройствам не по адресу, а по имени тега. Она применяется, если в сети более
15 устройств (это возможно, если используются повторители) или если устройствам
не присвоены короткие адреса.
Она применяется, если в сети более
15 устройств (это возможно, если используются повторители) или если устройствам
не присвоены короткие адреса.
Длинный адрес формируется из 40-битного уникального идентификатора HART-устройства (рис. 2.19) путем отбрасывания двух старших битов. Поэтому адрес получается 38-битным. Уникальный идентификатор HART-устройства состоит из идентификатора изготовителя (ID изготовителя), кода типа HART-устройства и серийного номера, который занимает 3 байта.
|
Рис. 2.19. Структура уникального идентификатора HART-устройства |
Следующая проблема HART-протокола связана с тем, что
идентификатор (ID) изготовителя
(рис. 2.19)
имеет длину всего 8 бит, т.е. с его помощью можно однозначно идентифицировать
только 256 изготовителей, что слишком мало.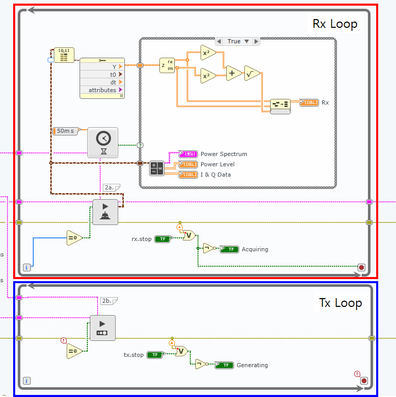 Поэтому для идентификации
изготовителя используются также часть поля серийного номера.
Поэтому для идентификации
изготовителя используются также часть поля серийного номера.
Еще одна проблема адресации связана с тем, что для получения длинного адреса используются только 6 бит из идентификатора изготовителя. Это означает, что четыре устройства с разными уникальными идентификаторами могут иметь один и тот же длинный адрес. Для устранения этой проблемы схему адресации выпускаемых устройств каждый изготовитель должен согласовывать с организацией HCF.
Короткий адрес имеет еще одно назначение: с его помощью отключают возможность использования в HART сообщении аналогового токового сигнала, что необходимо для объединения нескольких устройств в сеть. Перевод HART устройства в этот режим называется парковкой («parking») и выполняется путем установления значения короткого адреса равным 1…15.
HART-команды
бывают трех типов: универсальные, общепринятые и специфические. Универсальные и
общепринятые команды устанавливаются стандартом на HART-протокол и выполняют чтение и
запись серийного номера устройства, тега, дескриптора, даты, рабочей области
памяти, номера версии устройства и т. п. Эти параметры изменяются редко и
поэтому хранятся в ЭППЗУ.
п. Эти параметры изменяются редко и
поэтому хранятся в ЭППЗУ.
Специфические команды создаются изготовителем конкретного устройства и могут иметь идентификационные номера от 128 до 253. Поэтому одни и те же функции у разных производителей могут иметь различные номера. Команда с номером 255 не используется, чтобы ее можно было отличить от преамбулы (которая состоит из последовательности логических единиц). Команда с номером 254 зарезервирована.
Приведем примеры универсальных команд:
«Считать имя изготовителя и тип устройства»,
«Считать переменную и единицу измерения»,
«Считать переменную как величину тока и в процентах от диапазона»,
«Считать или записать 8-симольный тег, 16-символьный дескриптор и дату»,
«Считать или записать 32-символьное сообщение»,
«Считать диапазон значений переменной и единицу измерения»,
«Считать или записать серийный номер устройства»,
«Записать тег, описатель и дату «,
«Записать адрес
устройства».
Примеры распространенных команд:
«Считать четыре динамические переменные»,
«Записать постоянную демпфирования»,
«Записать диапазон измерения»,
«Калибровать»,
«Задать фиксированное значение выходного тока»,
«Выполнить самодиагностику»,
«Выполнить сброс»,
«Настроить ноль»,
«Записать единицы измерения»,
«Настроить ноль и коэффициент передачи АЦП»,
«Записать функцию преобразования»,
«Записать серийный номер сенсора».
Примеры специфических команд:
«Записать уставку ПИД-регулятора»,
«Включить ПИД-регулятор»,
«Считать или записать калибровочные коэффициенты»,
«Подстроить сенсор»,
«Установить позицию клапана».
HART-устройство
может иметь уникальный набор команд, устанавливаемых изготовителем или
специфическую последовательность команд, необходимых, например, для выполнения
процедуры калибровки. Ведущее устройство должно знать эти команды. Один из
возможных вариантов передачи описания команд от изготовителя пользователю — с
помощью текстового описания в руководстве по эксплуатации. Другим путем
является описание устройства с помощью специального языка описания устройств — Device Description Language (DDL), который распространяется и
поддерживается организацией HCF.
Ведущее устройство должно знать эти команды. Один из
возможных вариантов передачи описания команд от изготовителя пользователю — с
помощью текстового описания в руководстве по эксплуатации. Другим путем
является описание устройства с помощью специального языка описания устройств — Device Description Language (DDL), который распространяется и
поддерживается организацией HCF.
Описание устройства на языке DDL представляет собой текстовый файл, который может быть прочитан компилятором языка и преобразован в двоичный формат, воспринимаемый ведущим HART-устройством. Описание устройства может быть представлено компилятором в форме, удобной для системного интегратора. Применение DDL устраняет необходимость написания кода для общения с HART-устройствами.
Язык DDL поддерживается не всеми производителями и пока не получил достаточно широкого распространения.
Традиционный
HART-протокол
используется совместно с токовой петлей 4. ..20 мА. Однако в некоторых
приложениях, где отсутствует токовая петля, можно использовать только
программный протокол «HART-протокола»
совместно с другими методами реализации физического канала связи. Например, из
рис. 2.17
можно удалить все аналоговые блоки и
подключить к UART преобразователь интерфейса RS-485. При этом свойства канала связи на 1-м уровне модели OSI будут
соответствовать интерфейсу RS-485,
а протокол — стандарту HART.
..20 мА. Однако в некоторых
приложениях, где отсутствует токовая петля, можно использовать только
программный протокол «HART-протокола»
совместно с другими методами реализации физического канала связи. Например, из
рис. 2.17
можно удалить все аналоговые блоки и
подключить к UART преобразователь интерфейса RS-485. При этом свойства канала связи на 1-м уровне модели OSI будут
соответствовать интерфейсу RS-485,
а протокол — стандарту HART.
Существует также возможность передачи сигнала HART по выделенной телефонной линии, что связано с соответствием метода частотной модуляции в HART протоколе американскому стандарту для телефонных линий BELL202. Для этого используется передача сигнала только в форме напряжения при отключенном передатчике токовой петли 4…20 мА.
Аналогично,
HART-протокол
(как и другие протоколы) может использоваться для связи через оптоволокно
(Fiber Optic HART) или радиоканал (Wireless HART),
см. www.thehartbook.com.
www.thehartbook.com.
В настоящее время готовится очередная, 6-я версия HART-протокола. В ее основе лежит когерентная фазовая модуляция с 8 точками (фазами). Это позволит передавать данные со скоростью 9600 бит/с. В то же время 6-я версия будет обратно совместима с версией 5.0, в том числе с токовой петлей 4…20 мА.
Основная литература:
Скляр Б. Цифровая связь. М., Санкт-П, Киев: Изд. дом «Вильямс», 2003.
Теория электрической связи: Учебник для ВУЗов./ Зюко А.Г., Кловский Д.Д. – М:Радио и связь, 1999
Дополнительная литература:
Прокис
Дж. Цифровая связь. — М.: Радио и связь,
2000.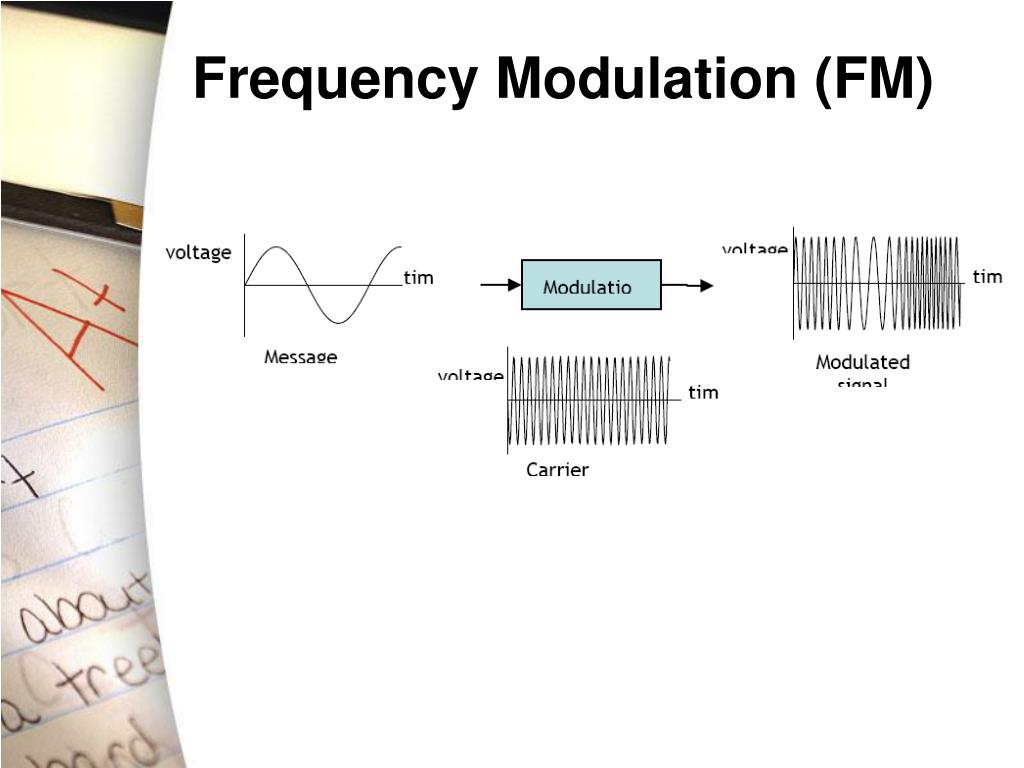
Цифровая связь. — М., Санк-П, Киев: Изд. дом «Вильяме», 2003.
Мирманов А.Б. Курс лекций по дисциплине «Технология цифровой связи» — Астана: КазАТУ, 2009. (электронный)
Ключевые слова: модуляция, модулятор, спектр сигнала, скорость модуляции, обратная работа.
Рассматриваемые вопросы:
Амплитудная модуляция
Частотная модуляция
Фазовая модуляция
Дискретный канал с ФМ
Методы преобразования спектра с использованием несущей
Чаще всего в качестве несущей используют гармоническое колебание:
Воздействуя
на соответствующий параметр амплитуду,
частоту или фазу, получаем соответственно
амплитудную, частотную или фазовую
модуляцию.
Амплитудная модуляция
Рисунок 10.1. Спектр сигнала при амплитудной модуляции
Минимальная длительность сигнала равна:
.
Учитывая, что получим для ФНЧ.
АМ сигнал в общем случае содержит и верхнюю и нижнюю боковые полосы частот, то ширина спектра АМ сигнала в 2 раза больше исходного — модулирующего.
Предельный случай , тогда
.
Значит предельная скорость передачи по каналу при АМ:
.
Рисунок 10.2. АМ — модулятор в простейшем случае
Частотная модуляция
При
передаче двоичных сигналов в канал
посылаются две частоты f1 (для обозначения 1) и f2 (для 0). Причём по рекомбинациям МСЭ — Т f2 > f1.
Причём по рекомбинациям МСЭ — Т f2 > f1.
Рисунок 10.3. Спектр сигнала при частотной модуляции
Спектр сигнала:
Предельная скорость модуляции при ЧМ
При заданном значении Fk максимальная скорость модуляции при ЧМ меньше, чем при АМ, но помехоустойчивость при частотной модуляции выше, поэтому она находит ограниченно применение в системах передачи дискретных сообщений.
Рисунок 10.4. Простейший ФМ — модулятор
Фазовая модуляция
В данном случае амплитуда и частоты постоянны, изменяется фаза в соответствии с модулирующим сигналом.
Если
модулирующий сигнал двоичный «1» или
«0», то значение фазы модулирующего
сигнала тоже две. Это значение отсчитывается
от фазы несущей. Обычно, при передаче
«1» модулятор формирует синусоидальный
сигнал, фаза которого совпадает с фазой
несущей. При 0
1800.
Обычно, при передаче
«1» модулятор формирует синусоидальный
сигнал, фаза которого совпадает с фазой
несущей. При 0
1800.
Рисунок 10.5. Фазовая модуляция
Спектр ФМ сигнала будет таким же, как у АМ по ширине, а несущая подавляется из-за противофазности. Но все составляющие увеличатся в 2 раза. Так как амплитуды составляющих больше, то у ФМ выше помехоустойчивость. Для ФМ можно записать
.
Рисунок 10.6. Структурные схемы ФМ – модулятора
Дискретный канал с ФМ
Рисунок 10.7. Структурная схема дискретного канала
с фазовой модуляцией
На
приемной стороне при демодуляции
принятый сигнал сравнивается с опорным
сигналом, при этом если фазы совпадают,
то была 1, нет – 0. Если фаза опорного
сигнала изменится на 180° , то 1 будет
воспринята как 0, а 0
1. Такой эффект называется «обратной
работой».
Такой эффект называется «обратной
работой».
«Обратная работа» — это основной недостаток абсолютной фазовой модуляции, именно по этой причине фазовая модуляция не нашла широкого применения в технике ПДС.
Контрольные вопросы по теме:
Для чего нужна модуляция
Какова максимальная скорость телеграфирования в канале с заданной полосой частот и аналоговой модуляцией.
Какова максимальная скорость телеграфирования в канале с заданной полосой частот и частотной модуляцией.
Какова максимальная скорость телеграфирования в канале с заданной полосой частот и фазовой модуляцией.
Какой эффект называется «обратной работой»
Используя этот протокол, мы исследуем зависимость параметрического охлаждения от времени модуляции с оптимизированной частотой модуляции и амплитудами, оба из которых были определены в нашей предыдущей публикации 7. Сначала готовят невзаимодействующих ферми — газ из 6 атомов Li в двух низших состояний сверхтонких с температурой Т / П ≈ 1.2. Здесь T F = (6N) 1/3 ħ ω / к В = 5,2 мкК определяется с числом атомов N = 1,7 × 10 5 на спин и геометрической средней частоты захвата со = (ω х ω ω у г) 1 / 3 = 2π × (2250 × 2450 × 220) 1/3 Гц, H приведенная постоянная Планка, а к в является постоянная Больцмана. Время-зависимые результаты показаны на рисунке 9 с частотой модуляции 1.45ω х, и глубиной модуляции 0,5. Изображения поглощения TOF — атомных облаков (рис 9а) показывают значительное уменьшение осевого размера облака с увеличением времени модуляции, что указывает на абсолютную температуру непрерывно уменьшается параметрической охлаждением.
Сначала готовят невзаимодействующих ферми — газ из 6 атомов Li в двух низших состояний сверхтонких с температурой Т / П ≈ 1.2. Здесь T F = (6N) 1/3 ħ ω / к В = 5,2 мкК определяется с числом атомов N = 1,7 × 10 5 на спин и геометрической средней частоты захвата со = (ω х ω ω у г) 1 / 3 = 2π × (2250 × 2450 × 220) 1/3 Гц, H приведенная постоянная Планка, а к в является постоянная Больцмана. Время-зависимые результаты показаны на рисунке 9 с частотой модуляции 1.45ω х, и глубиной модуляции 0,5. Изображения поглощения TOF — атомных облаков (рис 9а) показывают значительное уменьшение осевого размера облака с увеличением времени модуляции, что указывает на абсолютную температуру непрерывно уменьшается параметрической охлаждением.
Для количественного описания охлаждающего эффекта, мы используем Е (х, г) / Е в качестве эффективного термометрии для ультрахолодный Ферми газов 7, где Е является энергией Ферми и Е (х, г) является атомной энергией облака в радиальном и направление осевого соответственно. Мы во-первых, извлечь число, не зависящее средний квадрат размера (NIMS) от атомного облака. Тогда из NIMS, вычислим Е (х, г) / Е на рисунке 9б. Примерно через 500 мс модуляции, Е г / Е значительно уменьшается от 1,80 до 0,90 и Е х / Е слегка немного увеличен с 1.20 до 1.25. Убывающие атомные номера на фиг.9b вставке указывают на атомы исключены из ловушки. Мы считаем, что параметрическое охлаждение изменяет атомную энергию облака в анизотропном способе, в котором энергия в осевом направлении ниже энергии Ферми в то время как радиальная один еще выше энергии Ферми. Следует отметить , что начальная неравная энергия в осевой и радиальном направлении (рис 9b) порождается быстрой ловушкой опускания применяется в разделе 6.3. После параметрического охлаждения, осевое направление энергии значительно уменьшается, а радиальная энергия практически не изменилась. Этот результат указывает на то, что способ параметрического охлаждения изменяет облако энергии анизотропной. Этот анизотропный эффект обусловлен тем, чтодоминирующий энгармонизм ODT перекрещивающегося пучка вдоль осевого направления 7. Такие термодинамически анизотропные образцы могут быть использованы для изучения процессов термализации в взаимодействующей квантовой системе многих тел.
Следует отметить , что начальная неравная энергия в осевой и радиальном направлении (рис 9b) порождается быстрой ловушкой опускания применяется в разделе 6.3. После параметрического охлаждения, осевое направление энергии значительно уменьшается, а радиальная энергия практически не изменилась. Этот результат указывает на то, что способ параметрического охлаждения изменяет облако энергии анизотропной. Этот анизотропный эффект обусловлен тем, чтодоминирующий энгармонизм ODT перекрещивающегося пучка вдоль осевого направления 7. Такие термодинамически анизотропные образцы могут быть использованы для изучения процессов термализации в взаимодействующей квантовой системе многих тел.
Рисунок 1: сверхвысокая вакуумная система. Вакуумная камера ультрахолодной аппарата атома в IUPUI. 1. печь, 2. зеемановская медленнее, 3. Магнитные катушки, 4. Эксперимент 5. камеры и ПЗС-камеры. Пожалуйста , нажмите здесь , чтобы посмотреть увеличенную версию этой фигуры.
Рисунок 2: Временная последовательность для параметрического охлаждения. Черная кривая представляет собой волоконный лазер синхронизации мощности. Красная кривая является одним ое ODT АОМ времени. Кривая циан представляет собой магнитное поле. Оранжевая кривая импульсы TOF-визуализации. Горизонтальная ось показывает временную шкалу каждой стадии. Пожалуйста , нажмите здесь , чтобы посмотреть увеличенную версию этой фигуры.
Рисунок 3: Атомные уровни 6 Li и частота лазера блокировка спектров. а) 6 Li D 2 перехода для охлаждения и перекачивающих пучков ТО. б) Желтая кривой насыщенный спектры поглощения доплеровского свободный от 6 Li D 2 линии, а красные кривым является соответствующим замком в сигнале ошибки. Левый пик 2 2S 1/2 (F = 3/2) → 2 2P 3/2 перехода, правая является 22 S 1/2(F = 1/2) → 2 2Р 3/2 перехода, а среднее положение кроссовер сигнала из двух переходов. Поперечный тир точка блокировки. Пожалуйста , нажмите здесь , чтобы посмотреть увеличенную версию этой фигуры.
Рисунок 4: 6 Li печи. Каждая секция содержит маркировку с регулируемой температурой нагрева катушки для печи на выход требуемого атомного потока. Пожалуйста , нажмите здесь , чтобы посмотреть увеличенную версию этой фигуры.
FIGU ре 5: Зееманом медленнее. Катушка Кроссовер последний раздел зеемановским медленнее. Пожалуйста , нажмите здесь , чтобы посмотреть увеличенную версию этой фигуры.
Рисунок 6: MOT оптическая схема. Оптическая установка для генерации ТО и замедляющих лазерных лучей. Пожалуйста , нажмите здесь , чтобы посмотреть увеличенную версию этой фигуры.
Рисунок 7: MOT и изображение поглощения ODT. а) MOT изображение после откачки фазы. б) Изображение перекрытой ТО и ODT._upload / 55409 / 55409fig7large.jpg»целевых =„_blank“> Пожалуйста, нажмите здесь, чтобы посмотреть увеличенную версию этой фигуры.
а) MOT изображение после откачки фазы. б) Изображение перекрытой ТО и ODT._upload / 55409 / 55409fig7large.jpg»целевых =„_blank“> Пожалуйста, нажмите здесь, чтобы посмотреть увеличенную версию этой фигуры.
Рисунок 8: пересеченная-луч ODT оптическая схема. Углом пересечения ODT является 2θ = 12 °. Волоконный лазер АФГ управляет пульсацией лазера, ODT АФГ управляет ловушкой опускания кривого, и параметрический модуляции АФГ управляет модуляцией интенсивности лазерного излучения. Пучка талии обоих пучков составляет около 37 мкм. Поляризации первого луча по вертикали и поляризация второго пучка находится в горизонтальном положении. Пожалуйста , нажмите здесь , чтобы посмотреть увеличенную версию этой фигуры.
Рисунок 9: ВремяИзмерение зависимости параметрического охлаждения. а) абсорбция изображение атомных облаков различных времен модуляции. б) Зависимость Е (х, г) / Е по времени модуляции (синие круги для Е г / E F и красные квадраты для Х х / Х F). Цифра врезке это число атомов в зависимости от времени модуляции. Столбики ошибок представляют собой одно стандартное отклонение. Пожалуйста , нажмите здесь , чтобы посмотреть увеличенную версию этой фигуры.
б) Зависимость Е (х, г) / Е по времени модуляции (синие круги для Е г / E F и красные квадраты для Х х / Х F). Цифра врезке это число атомов в зависимости от времени модуляции. Столбики ошибок представляют собой одно стандартное отклонение. Пожалуйста , нажмите здесь , чтобы посмотреть увеличенную версию этой фигуры.
| MOT нагрузка на | Начальная точка |
| Время MOT загрузки | 10 лет |
| MOT охлаждения на | MOT нагрузка от |
| Время охлаждения MOT | 5 мс |
| MOT откачки | MOT охлаждение |
| Время MOT насосного | 100 мкс |
| MOT АОМ от | MOT выкл (То же самое, как MOT откачка) |
| Zeeman медленнее затвор пучка на | 200 мс до начала загрузки MOT выключения |
| MOT луч затвора на | MOT от |
| Волокно лазера испарительного охлаждения время начала | 14 мс до конца загрузки MOT |
| ODT испарительного охлаждения времени начала | 500 мс после выключения MOT |
| Н-моста реле времени | MOT от |
| Магнитное поле развертки время начала (от 0 до 330 г) | MOT от |
Магнитное поле развертки время начала (от 330 до 527.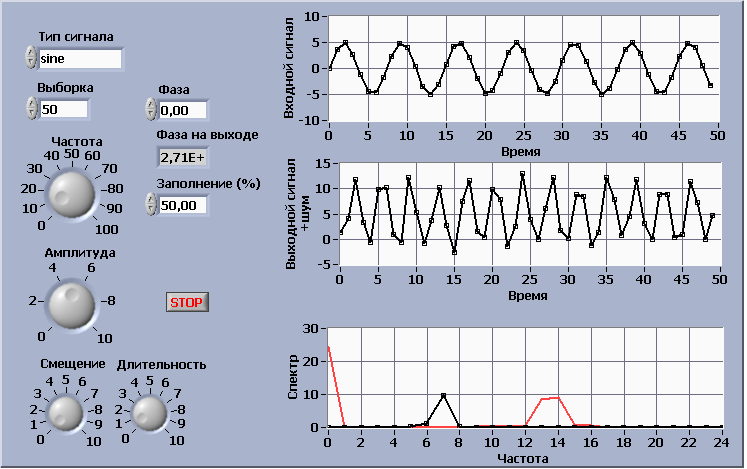 3G) 3G) | 2000 мс после отключения MOT |
| Время начала Параметрического охлаждения | 2500 мс после отключения MOT д> |
| Время обработки изображений запускающего импульса | 3200 мс после отключения MOT |
| CCD время запуска | 100 мкс до момента запуска импульса изображения |
Таблица 1: Экспериментальное управление синхронизацией. Временные параметры последовательности для управления экспериментальных инструментов. Временная последовательность начинается в MOT загрузки, охлаждения и перекачки. От MOT времени точка после MOT накачки.
| канал 1 | канал 2 | канал 3 | Channel 4 | канал 5 |
| 348 ° С | 354 ° С | 434 & deg; С | 399 ° С | 372 ° С |
 within-page=»1″> Таблица 2: Овеп температурный профиль. 6 Li печь работает при оптимальном потоке с перечисленными температурами.
within-page=»1″> Таблица 2: Овеп температурный профиль. 6 Li печь работает при оптимальном потоке с перечисленными температурами.| фаза | загрузка | охлаждение | накачка | |||
| Луч | охлаждение | перекачивающий | охлаждение | перекачивающий | охлаждение | перекачивающий |
| Отстройка от запертого перехода (МГц) | -28 | -28 | -5 | -5 | -2 | OFF |
| Интенсивность (я сидел) | 2 | 1 | 0,1 | 0,05 | 0,08 | OFF |
Таблица 3: фазы MOT свойства. Последовательность фаз MOT предназначена для максимального тысе число атомов, которые будут переданы в ODT.
Subscription Required. Please recommend JoVE to your librarian.
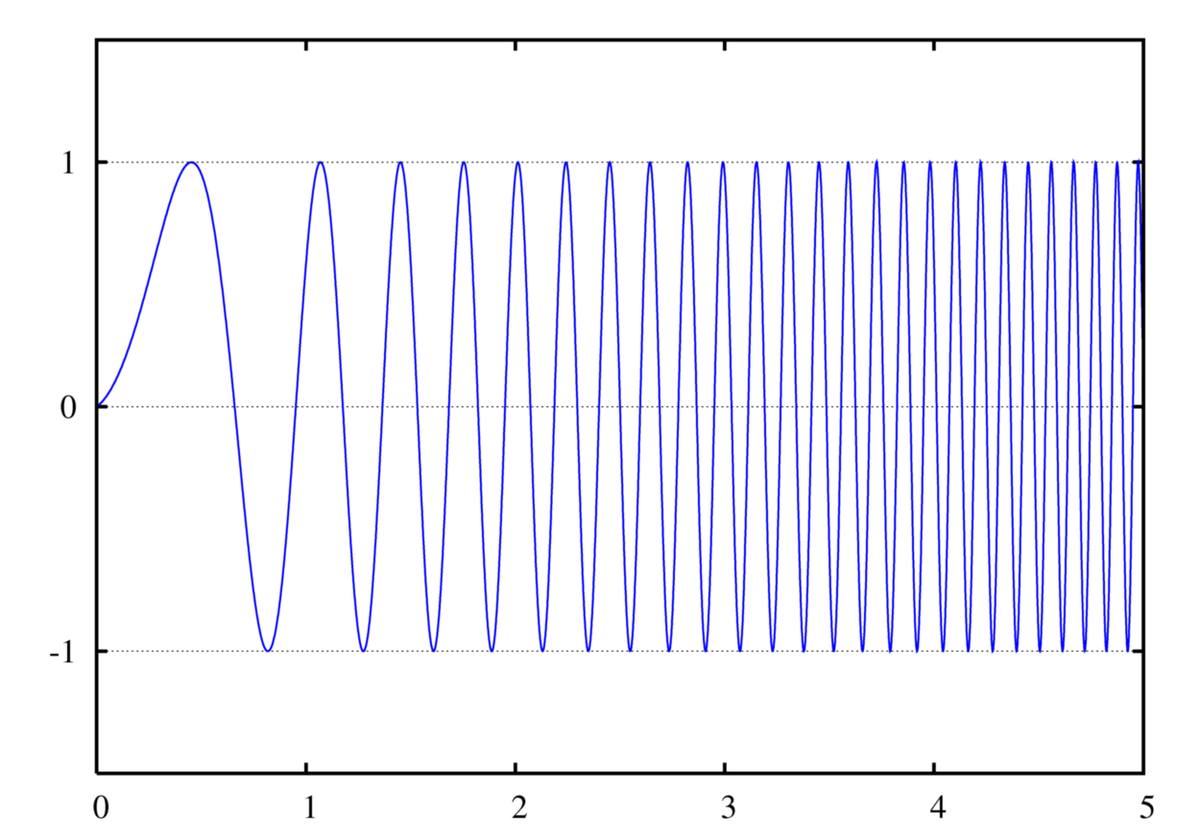
Основной принцип FM состоит в том, что амплитуда аналогового сигнала основной полосы частот может быть представлена немного другой частотой несущей. Мы представляем эту взаимосвязь на графике ниже.
Как показано на этом графике, различные амплитуды сигнала основной полосы частот (показаны белым цветом) относятся к конкретным частотам сигнала несущей (показаны красным). Математически мы представляем это, описывая уравнения, которые характеризуют FM.
Во-первых, мы представляем наше сообщение, или сигнал основной полосы частот, простым обозначением m (t) . Во-вторых, мы представляем синусоидальную несущую уравнением:
x c (t) = A c cos (2πf c t) .
Фактический математический процесс для модуляции сигнала основной полосы частот m (t) на несущую требует двухэтапного процесса. Во-первых, сигнал сообщения должен быть интегрирован относительно времени, чтобы получить уравнение для фазы относительно времени, θ (t).Эта интеграция обеспечивает процесс модуляции, поскольку фазовая модуляция довольно проста с типичной схемой I / Q-модулятора. Ниже приводится описание блок-схемы FM-передатчика.
Во-первых, сигнал сообщения должен быть интегрирован относительно времени, чтобы получить уравнение для фазы относительно времени, θ (t).Эта интеграция обеспечивает процесс модуляции, поскольку фазовая модуляция довольно проста с типичной схемой I / Q-модулятора. Ниже приводится описание блок-схемы FM-передатчика.
Как показано на приведенной выше блок-схеме, интегрирование сигнала сообщения приводит к уравнению для фазы относительно времени. Это уравнение определяется следующим уравнением:
, где k f — частотная чувствительность.Опять же, результирующая модуляция, которая должна произойти, — это фазовая модуляция, которая включает изменение фазы несущей с течением времени. Этот процесс довольно прост и требует квадратурного модулятора, показанного ниже.
В результате фазовой модуляции результирующий FM-сигнал, s (t) , теперь представляет собой частотно-модулированный сигнал. Это уравнение показано ниже.
Это уравнение показано ниже.
, где м (τ) = M cos (2πf м τ) .Проще говоря, мы также можем представить это уравнение как:
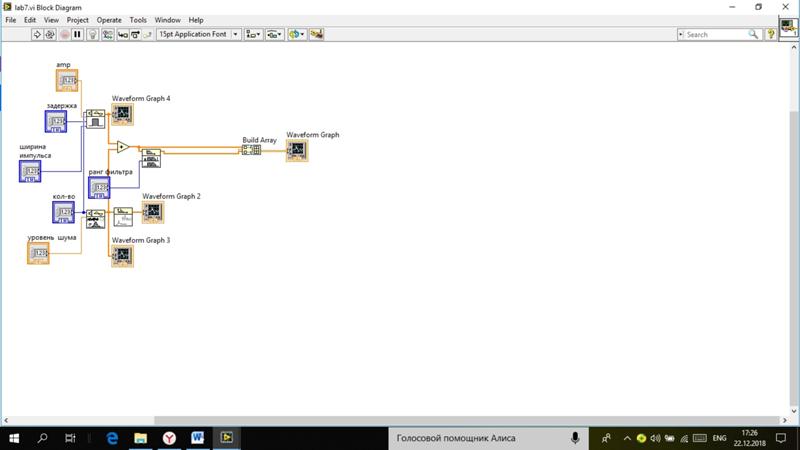
ЦЕЛЬ ПРОЕКТА
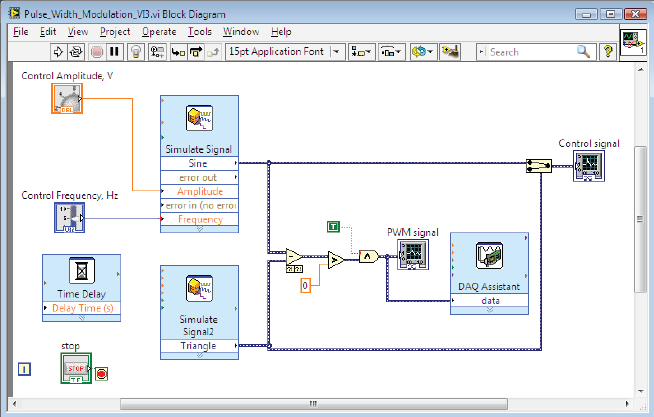
Целью проекта является разработка модуляции AM / FM с использованием LabVIEW (язык G)
Цель:
1. Имитация сигнала модуляции FM и спектральный
2. Имитируйте сигнал модуляции AM и спектральный
3. Показывайте разные типы волн
ВВЕДЕНИЕ
В телекоммуникациях и электронике модуляция просто означает изменение некоторых аспектов непрерывного сигнала несущей
с формой волны модуляции, несущей информацию , например видеосигнал
, представляющий изображения, или аудиосигнал, представляющий звук.В этом случае модуляция
— это просто процесс, посредством которого несущая волна преобразовывается таким образом, что
может нести информацию о ней. Существуют основные методы преобразования несущей
Существуют основные методы преобразования несущей
волны: AM (амплитудная модуляция) — это мощность переданной несущей
(амплитуда) изменяется в зависимости от сообщения, которое должно быть передано; FM (частота
модуляция) — просто частота несущей изменяется в соответствии с сообщением, которое передается на
, И PM (фазовая модуляция) — фаза переданной несущей изменяется на
в соответствии с сообщением, которое должно быть передано ( Кавелл, 2018).
Основная цель модуляции в телекоммуникационных и электронных системах состоит в том, чтобы
генерировать модулирующий сигнал, соответствующий характеристикам каналов передачи. В радиосвязи
модуляция необходима для системы передачи для передачи сообщения
в регулируемый высокочастотный радиоканал. Модуляция обычно используется, например, в модемах голосового диапазона
, где цифровые данные модулируют несущие частоты внутри голосового диапазона
(Википедия). Частотная модуляция (FM) и амплитудная модуляция (AM) — это типы модуляции (кодирования)
Частотная модуляция (FM) и амплитудная модуляция (AM) — это типы модуляции (кодирования)
, которые оба транслируют радиосигналы, оба передают информацию в форме
электромагнитных волн. FM передает информацию через частоту, в то время как
амплитуда остается постоянной. В то время как AM работает путем модуляции амплитуды сигнала
или несущей, передаваемого в соответствии с отправляемой информацией. AM (модуляция амплитуды
) аудиопередачи была обнаружена в середине 1870-х годов для создания качественного радио
по телефонным линиям и оригинального метода, используемого для аудиопередач.Радио FM
(частотная модуляция) было инвертировано американским инженером Эдвином Армстронгом в
1930-х годов. Этот проект
Частотный диапазон
Типичный частотный диапазон, в котором работает AM, составляет от 535 до 1705 килогерц, тогда как частотный диапазон
составляет около 88-108 мегагерц для FM
[1]
Чжоу Ли.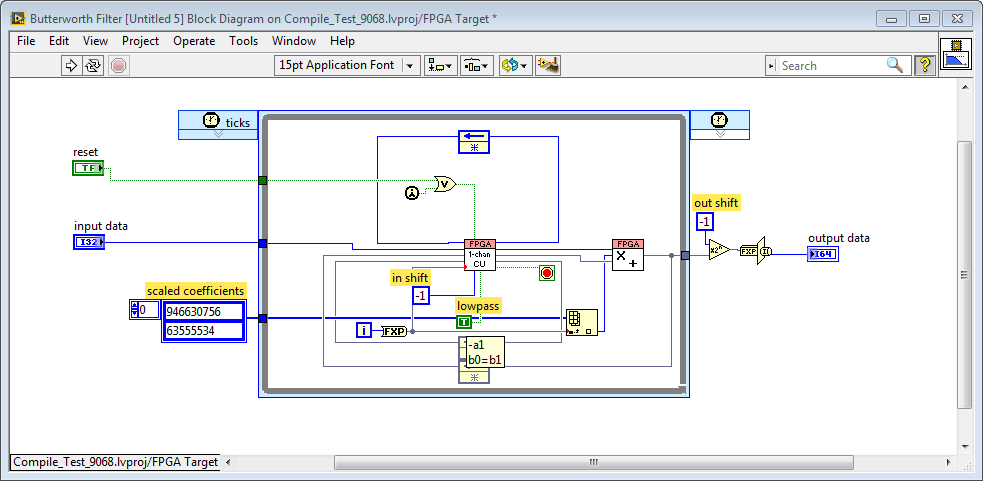 Исследование радара предупреждения столкновений автомобилей. Магистерская работа Нанкинского университета науки и технологий, Нанкин: Нанкинский университет науки и технологий (2008 г.).
Исследование радара предупреждения столкновений автомобилей. Магистерская работа Нанкинского университета науки и технологий, Нанкин: Нанкинский университет науки и технологий (2008 г.).
DOI: 10.14257 / astl.2014.45.21
[2] Чжан Дабяо, Ю Хуалун.Конструкции автомобильной системы аварийной сигнализации на базе LabVIEW. Компьютерная инженерия и приложения, 2008, 44 (21): 54-56.
[3]
Ли Цзинго. Анализ использования радиолокационной системы для повышения безопасности автомобилей. Управление и технологии малых и средних предприятий, 2009 (18).
Анализ использования радиолокационной системы для повышения безопасности автомобилей. Управление и технологии малых и средних предприятий, 2009 (18).
[4] Лю Ганг, Хоу Дезао и др.Алгоритмы аварийной сигнализации для активной системы предотвращения столкновений автомобилей, Журнал Университета Цинхуа (ИЗДАНИЕ ЕСТЕСТВЕННЫХ НАУК), 2004 г., 44 (5): 697-700.
[5]
ZHANG Da-biao, WANG Yan-ju, WANG Yu-tian и др. Исследование системы измерения скорости и расстояния на основе радара миллиметрового диапазона. ISIST. 2004, 3: 1081-1086.
Исследование системы измерения скорости и расстояния на основе радара миллиметрового диапазона. ISIST. 2004, 3: 1081-1086.
Учебное пособие по частотной модуляции Включает:
Частотная модуляция, FM
Индекс модуляции и коэффициент отклонения
Боковые полосы FM, полоса пропускания
FM демодуляция
Детектор наклона FM
Детектор отношения FM
Детектор Foster Seeley
Демодулятор ЧМ с ФАПЧ
Квадратурный демодулятор
МСК
ГМСК
Форматы модуляции: Типы и методы модуляции Амплитудная модуляция Фазовая модуляция Квадратурная амплитудная модуляция
FM-демодуляция также называется FM-обнаружением, и иногда используется фраза «FM-дискриминация», хотя этот термин обычно используется в старых схемах и технологиях.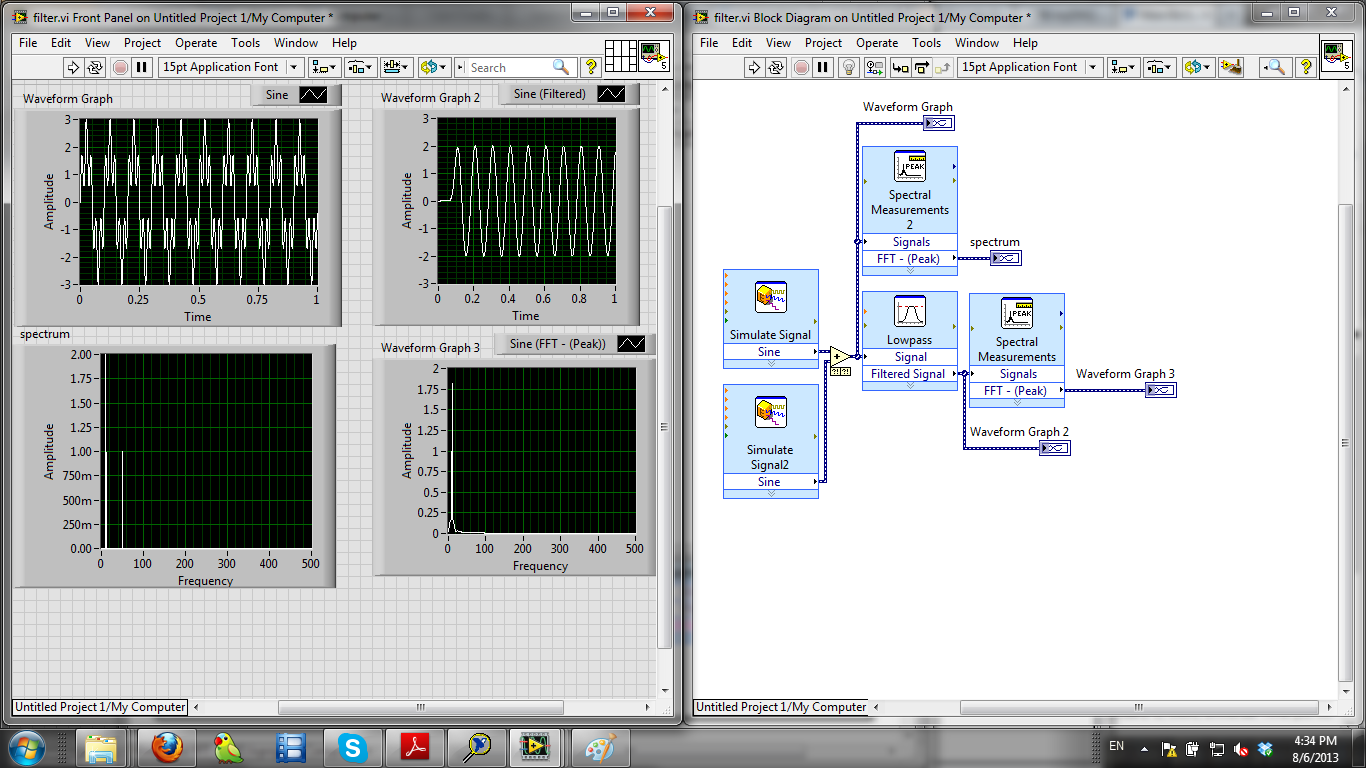
FM-демодуляция — ключевой процесс при приеме частотно-модулированного сигнала. После того, как сигнал был принят, отфильтрован и усилен, необходимо восстановить исходную модуляцию от несущей. Именно этот процесс называется демодуляцией или детектированием.
Цепи демодулятораFM можно найти в любом приемнике, который использует FM: радиовещательных приемниках, двухсторонних радиостанциях, таких как рации и портативных радиостанциях, которые используют FM, а также в любом приемнике, в котором используется частотная модуляция.
В любом радиоприемнике, предназначенном для приема частотно-модулированных сигналов, есть какой-либо FM-демодулятор или детектор.
Эта схема принимает радиочастотные сигналы с частотной модуляцией и принимает модуляцию от сигнала для вывода только модуляции, которая была применена в передатчике.
Принцип демодуляции FMЧтобы иметь возможность демодулировать FM, радиоприемник должен преобразовывать изменения частоты в изменения напряжения — это преобразователь частоты в напряжение.Когда несущая частота отклоняется к нижнему пределу частотного диапазона, в котором она отклоняется, может создаваться более низкое напряжение, тогда, когда оно отклоняется выше по частоте, создается более высокое напряжение.
Хотя легче представить себе более низкие частоты, вызывающие более низкое напряжение, в этом нет необходимости, может быть наоборот.
Одним из главных требований к FM-демодулятору является то, что он должен иметь максимально линейный отклик в требуемой полосе пропускания.Другими словами, сдвиг заданной частоты вызывает такое же изменение выходного сигнала везде, где оно может быть обнаружено на кривой. Если ответ нелинейный, то появятся искажения.
Еще одним требованием к FM-демодулятору является то, что он не должен быть чувствительным к изменениям амплитуды. Поскольку модуляция осуществляется только за счет отклонения частоты, не требуется никакой амплитудной чувствительности. Любой сигнал амплитуды, вероятно, будет шумом, и, сделав приемник нечувствительным к изменениям амплитуды, можно улучшить отношение сигнал / шум.
Устойчивость к шуму является основным фактором в обеспечении приема FM с низким уровнем шума для таких приложений, как высококачественное аудиовещание. Это также означает, что для мобильной радиосвязи или портативной радиосвязи уменьшается влияние колебаний уровня сигнала и замирания из-за движения.
Если FM-демодулятор чувствителен к изменениям амплитуды, а также к изменениям частоты, то перед демодулятором может быть ступень ограничивающего усилителя. Эта стадия переходит в насыщение, когда присутствует сигнал достаточной силы.При работе в режиме насыщения отклонения амплитуды удаляются.
S-характеристика частотного демодулятораОтклик, который обычно наблюдается для FM-демодулятора / FM-детектора, по понятным причинам известен как S-образная кривая. В центре кривой отклика есть линейный участок, а ближе к краю отклик становится очень искаженным.
Как и следовало ожидать, кривая отклика детектора не может оставаться линейной в огромном диапазоне частот. Вместо этого он должен быть достаточно широким, чтобы учесть ширину отклонения сигнала, и немного больше, чтобы обеспечить дополнительный запас.
Можно использовать несколько типов FM-детекторов / демодуляторов. Некоторые типы были более популярны в те дни, когда радиоприемники делались из дискретных устройств, но в настоящее время наиболее широко используются детектор на основе ФАПЧ и квадратурные детекторы / детекторы совпадений, поскольку они очень легко встраиваются в интегральные схемы и не требуют большого количества , если есть корректировки.
Чтобы улучшить шумовые характеристики FM-приемника, обычно каскад ПЧ может работать так, что усилитель ПЧ переводится в режим ограничения.Это устраняет вариации амплитуды, которые приводят к шуму, и позволяет только изменять частоту.
Основные типы FM-демодуляторов, используемых в радиовещательных приемниках, системах радиосвязи, двухсторонних радиоприемниках, рациях / портативных радиостанциях и т. Д., Описаны ниже:
Эта форма обнаружения FM имеет очень много ограничений: кривая избирательности радио не будет совсем линейной и возникнут искажения; приемник будет чувствителен к колебаниям амплитуды и т. д.
Несмотря на то, что он работал хорошо, частотный FM-детектор был дорогой формой детектора из-за используемого трансформатора. Поскольку все намотанные компоненты более дороги, чем резисторы и конденсаторы, эти FM-демодуляторы были дорогими в изготовлении, и после внедрения технологии интегральных схем, в которой можно было использовать разные схемы, детектор отношения использовался редко. Тем не менее, в свое время он хорошо себя проявил.
FM-демодулятор Foster Seeley во многих отношениях был очень похож на детектор отношения. Однако вместо третьей обмотки трансформатора был использован отдельный дроссель.
Как и детектор отношения, детектор Фостера-Сили выпал из широкого использования, когда были введены интегральные схемы, поскольку другие формы FM-демодулятора было намного проще реализовать с помощью интегральных схем, а их производительность была выше.
Контур фазовой автоподстройки частоты или ЧМ-демодулятор ФАПЧ работал, потому что контур был настроен на отслеживание мгновенной частоты входящего ЧМ-сигнала. Чтобы обеспечить синхронизацию контура, управляемый напряжением генератор внутри контура должен отслеживать частоту входящего сигнала. Напряжение настройки для ГУН изменялось в соответствии с мгновенной частотой сигнала и, следовательно, обеспечивало демодулированный выходной сигнал аудио или другого сигнала модуляции.
Эти FM-демодуляторы используются в различных приложениях. Различные типы FM-демодуляторов предоставляют разработчикам возможность выбора подходов в зависимости от области применения: радиовещание, двусторонняя радиосвязь, включая рации и портативные радиоприемники, приемники связи с высокими техническими характеристиками и т.п.
Хотя наиболее широко используются ЧМ-детектор с ФАПЧ и квадратурные детекторы, а также схемы на основе фазовой автоподстройки частоты.Детекторы Foster Seeley и ratio FM все еще используются в некоторых случаях, но обычно они встречаются только в старых радиостанциях, использующих дискретные компоненты.
Другие важные темы по радио:
Радиосигналы
Типы и методы модуляции
Амплитудная модуляция
Модуляция частоты
OFDM
ВЧ микширование
Петли фазовой автоподстройки частоты
Синтезаторы частот
Пассивная интермодуляция
ВЧ аттенюаторы
RF фильтры
Радиочастотный циркулятор
Типы радиоприемников
Радио Superhet
Избирательность приемника
Чувствительность приемника
Обработка сильного сигнала приемника
Динамический диапазон приемника
Вернуться в меню тем радио.. .
Исследователь НАСА Гарри Бертон настраивает программу LabView для управления движением в лазерной камере. Имиджевый кредит: URC.
Государственный университет штата Делавэр
Специальность: Прикладная оптика
Степень: Магистр наук
Место стажировки: Центр космических полетов имени Годдарда НАСА, Гринбелт, Мэриленд
Наставник: Эдуард Лужанский
Abstract: Квантовые каскадные лазеры (ККЛ) могут быть разработаны для работы в любом диапазоне от среднего ИК до ТГц спектра, а их небольшой размер, настраиваемые частоты и высокая выходная энергия делают их отличным выбором для обнаружения следовых газов.В ходе стажировки наша работа заключалась в создании лазерной системы, способной производить достаточно низкие частоты биений, которые можно было бы обнаружить с помощью анализатора спектра. После стажировки QCL должен был подвергнуться экспериментам по обнаружению различных молекул. Исследования и эксперименты с QCL позволят использовать их как в науках о Земле, так и в будущих планетарных миссиях НАСА. ККЛ относительно новы в области спектроскопии и работают по принципу, отличному от принципа обычных диодных лазеров на p-n-переходе.В диодном лазере электроны зоны проводимости прыгают в дырку валентной зоны и излучают фотон, длина волны которого определяется энергией запрещенной зоны полупроводника, известной как межзонный переход. С помощью ККЛ электрон зоны проводимости может совершить серию скачков в ступенчатом потенциале, существующем в зоне проводимости, испуская идентичный фотон на каждом переходе. Здесь один электрон испускает каскад фотонов, приводящий к образованию мощного лазера. Переходы внутри ККЛ происходят от подзоны к подзоне внутри квантовой ямы, переходя в следующую квантовую яму и так далее.Таким образом, они называются межподзонными переходами.
* Если у вас возникли проблемы с просмотром этого плаката, загрузите его в формате pdf.
В этом документе рассматривается реализация высокопроизводительного ЧМ-модулятора и демодулятора на ПЛИС для программно-конфигурируемой радиосистемы (SDR). Отдельный компонент предлагаемого FM-модулятора и демодулятора был оптимизирован таким образом, что общая конструкция состоит из высокоскоростных, оптимизированных по площади и маломощных функций.Модулятор и демодулятор содержат оптимизированный прямой цифровой синтезатор частоты (DDFS), основанный на методе четвертьволновой симметрии для генерации несущей частоты с динамическим диапазоном без паразитных составляющих (SFDR) более 64 дБ. Модулятор FM использует конвейерную версию DDFS для поддержки повышающего преобразования в цифровой области. Предложенные FM-модулятор и демодулятор были реализованы и протестированы с использованием ПЛИС XC2VP30-7ff896 в качестве целевого устройства и могут работать на максимальной частоте 334.5 МГц и 131 МГц, включая примерно 1,93 К и 6,4 К эквивалентных вентилей для FM-модулятора и FM-демодулятора соответственно. После применения входного сигнала треугольной формы 10 кГц и установки системной тактовой частоты на 100 МГц с помощью Xpower была рассчитана мощность. Модулятор FM потребляет мощность 107,67 мВт, в то время как демодулятор FM потребляет мощность 108,67 мВт для того же входа, работающего с той же скоростью передачи данных.
В распространенных приложениях аудиовещания, таких как стандарты частного мобильного радио (PMR) и цифрового наземного аудиовещания (DAB-T), для передачи голоса требуется превосходная четкость наряду со стабильностью источника.Схема частотной модуляции (FM) используется в большинстве этих стандартов. Традиционно для генерации FM-сигнала использовались некоторые аналоговые компоненты для поддержки стандартов аудиовещания. Но возникли трудности с аналоговой схемой модуляции ЧМ из-за использования генератора, управляемого напряжением (ГУН). Используя ГУН, очень трудно получить хорошую четкость, а также стабильность источника в FM-модулированном или демодулированном сигнале, поскольку ГУН страдает отсутствием линейности в желаемом диапазоне частот.Таким образом, цифровая реализация схемы модуляции FM эволюционировала, чтобы заменить традиционный аналоговый аналог. В настоящее время для получения превосходных характеристик и хорошей четкости голоса в любой системе аудиовещания широко используется метод цифровой FM-модуляции и демодуляции. Чтобы обеспечить линейность во всем частотном диапазоне, разработчики решили заменить ГУН на DDFS, иногда называемый генератором с числовым управлением (NCO). Значительные исследования были выполнены по различным архитектурам цифровых FM модулятор.В некоторых из них делается упор на уменьшение эффекта искажения шума квантования, который возникает из-за битового разрешения на входе и выходе DDFS [1]. Некоторые из них рассматривали оптимизацию площади и низкое энергопотребление [2–4] в качестве основной цели. В настоящей работе один высокоскоростной цифровой FM-модулятор с низким энергопотреблением и уменьшенной площадью был реализован в устройстве FPGA для поддержки системы аудиовещания в системе программно-определяемого радио (SDR).
Существуют различные архитектуры [5–14] для реализации цифрового FM-демодулятора в одном кристалле, хотя их производительность в основном ограничивается точностью обработки аналогового сигнала.Основные принципы FM-демодуляции заключаются в том, как точно отличить небольшое отклонение частоты модулированного FM-сигнала от его центральной частоты. Метод ФАПЧ — один из популярных методов демодуляции ЧМ. Его можно легко реализовать в интегрированных формах, но внезапное отклонение от его свойства линейности ГУН в некоторых частях частотного диапазона ухудшает общую производительность системы. Цифровые ФАПЧ представляют собой лучшее возможное решение для преодоления некоторых узких мест аналоговых ФАПЧ [15].Из-за этого в существующих FM-демодуляторах цифровая фазовая автоподстройка частоты (DPLL) в основном используется для выполнения частотной дискриминации. DPLL отслеживает изменения фазы и частоты принимаемого сигнала. Существуют также некоторые другие методы, с помощью которых частота может быть вычислена из отношения синфазной (I) и квадратурной (Q) составляющих. Современная связь вращается вокруг высокоскоростной передачи и приема данных с высокой скоростью. Реализация FM-демодуляторов в DSP на основе DPLL часто не отвечает таким строгим требованиям системы беспроводной связи.Альтернативное решение — реализовать его в FPGA из-за его гибкости и модульности. Маломощный и высокоскоростной линейный цифровой ЧМ-демодулятор с уменьшенной площадью, использующий технологию DPLL [5, 6], был реализован для разработки системы SDR. В этой работе были выполнены покомпонентные улучшения, чтобы получить компактную архитектуру, более быстрые системные часы и добиться меньшего энергопотребления по сравнению с существующими реализациями цифрового FM-демодулятора. В приложениях SDR ключевая проблема — меньшая площадь и низкое энергопотребление с поддержкой высокой скорости передачи данных.Ориентируясь на приемопередатчик беспроводной связи следующего поколения на основе SDR, в этой работе все основные компоненты FM-демодулятора на основе DPLL полностью оптимизированы без потери выходных характеристик системы по сравнению с предыдущими реализациями FM-демодулятора на основе DPLL.
Настоящая статья выглядит следующим образом. В разделе 2 описываются принцип и архитектура FM-модулятора и FM-демодулятора на основе DPLL, а также архитектура отдельных компонентов FM-модулятора и FM-демодулятора на основе DPLL, а в разделе 3 представлены результаты реализации FPGA с точки зрения результатов синтеза, результатов моделирования, Приведены результаты проверки на кристалле и результаты сравнения.Выводы приведены в разделе 4.
В методе модуляции FM, который представляет собой разновидность методов угловой модуляции, мгновенная частота несущего сигнала изменяется линейно с модулированным сигналом сообщения основной полосой частот следующим образом: где — амплитуда несущей, — несущая частота, — постоянная девиации частоты.Архитектура модулятора FM показана на рисунке 1.
Модулятор FM состоит из (1) генератора данных FM, (2) интерполятора с коэффициентом интерполяции 32, (3) аккумулятора и (4). ) блок DDFS. Сигнал FCW использовался для генерации различных несущих частот. Блок накопителя складывает мгновенную частоту входного аудиосигнала с выбранной несущей частотой. И, наконец, блок DDFS принимает эту частоту как вход и генерирует FM-модулированный сигнал.Архитектура блока DDFS обсуждалась в следующем разделе.
(1) Генератор данных FM
Обычно схема модуляции FM используется для поддержки обработки звука в системе аудиовещания. Обычно аудиосигнал обрабатывается в диапазоне от 44 до 320 кбит / с. Входные данные FM дискретизируются на каждой тактовой частоте символа FM и сохраняются в регистре для дальнейшей обработки. Оцифрованные входные данные проходят через последовательно-параллельный преобразователь для генерации 8-битных входных данных FM.Архитектура генератора данных FM показана на рисунке 2.
(2) Интерполятор
Блок интерполятора используется в модуляторах FM для получения лучшего уровня мощности для передачи FM. В этой работе коэффициент интерполяции 32 был использован между двумя последовательными выборками звука. Схемы сначала вычисляют разность, а затем делят остаток на 32. Чтобы выполнить деление на 32, новые входные данные FM сдвигаются на один бит до и на четыре бита после вычитания.Затем к выходным данным добавляются предыдущие входные данные для каждого тактового сигнала символа. Для аппаратного выполнения операции интерполяции требуются один вычитатель, один сумматор и несколько регистров. Архитектура интерполятора показана на рисунке 3.
Спектральная плотность мощности разработанного FM модулятора показана на рисунке 4.
Работа цифровой схемы фазовой автоподстройки частоты как важного компонента ЧМ-демодулятора была задумана в начале 1970-х годов [16, 17].Входной частотно-модулированный сигнал можно выразить следующим образом: Механизм обратной связи ФАПЧ заставляет DDFS генерировать синусоидальный сигнал с той же частотой, что и у, где Выходной сигнал фазового детектора, который является продуктом этих двух сигналов, определяется с использованием знакомой тригонометрической идентичности: где — коэффициент усиления фазового детектора. Первое слагаемое в (4) соответствует высокочастотной составляющей.Второй член соответствует разности фаз между и. Разность фаз, то есть между модулированным сигналом и несущей, дает желаемый исходный сигнал с частотой.
Единственный наиболее важный момент, который следует учитывать при проектировании ФАПЧ, заключается в том, что это система с обратной связью и, следовательно, она характеризуется математически теми же уравнениями, которые применяются к другим более традиционным системам управления с обратной связью. Математическая модель цифровой системы ФАПЧ может быть получена для анализа переходных и установившихся характеристик.Блок-схема типичной цифровой системы ФАПЧ в области [18] (дискретная область) и ее преобразование в области [19] (непрерывное время) показаны на рисунке 5.
Передаточная функция системы равна Система DPLL второго порядка улучшает характеристики контура с точки зрения скорости и диапазона захвата по сравнению с системой DPLL первого порядка. Поэтому используемая здесь система DPLL относится к системе второго порядка. Кривая отклика на единичный скачок получается с использованием MATLAB для системы, показанной на рисунке 6.Из рисунка видно, что система устойчива с выбросами в переходном состоянии.
Полный FM-приемник состоит из основных строительных блоков, как показано на рисунке 7. FM-приемник состоит из четырех основных частей: (1) фазовый детектор (PD), (2) контурный фильтр (LF), (3) Прямой цифровой синтезатор частоты (DDFS) и (4) КИХ-фильтр.
Фазовый детектор используется для обнаружения фазовой ошибки между входящим частотно-модулированным сигналом от АЦП и выходной частотой, генерируемой DDFS.Для этой операции нужен один регистр и один модуль умножения. Вместо знакового арифметического умножителя используется модифицированная архитектура умножителя дерева Уоллеса, закодированного в кабине Radix-4 [20–22]. Эта архитектура была выбрана потому, что она уменьшает количество частичных произведений для процесса умножения битов. Обычно в умножителе Бута с основанием 4, необходимо выполнить три основных шага: (1) сгенерировать сокращенное частичное произведение в соответствии с алгоритмом Бута, (2) уменьшить количество добавлений частичного произведения и, наконец, (3) используйте высокоскоростной сумматор, такой как сумматор с упреждающим переносом (CLA), для последних двух строк частичного дерева продукта.Для операции знакового умножения схема расширения знака была объединена с алгоритмом Бута, который известен как модифицированный алгоритм Бута. Для умножения с использованием алгоритма Бута, модифицированного по основанию 4, три бита части умножителя будут сгруппированы и закодированы в один из значений, указанных в таблице 1.
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
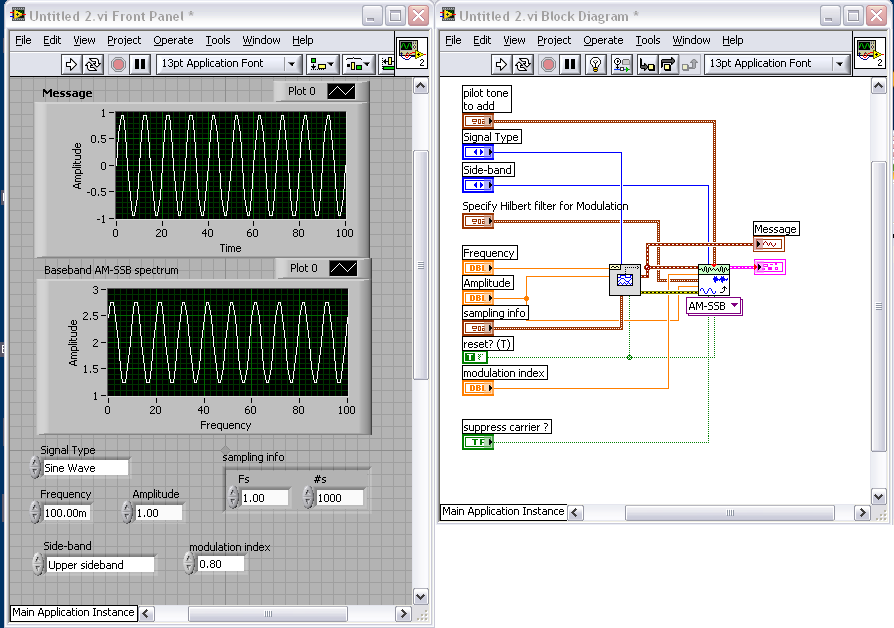
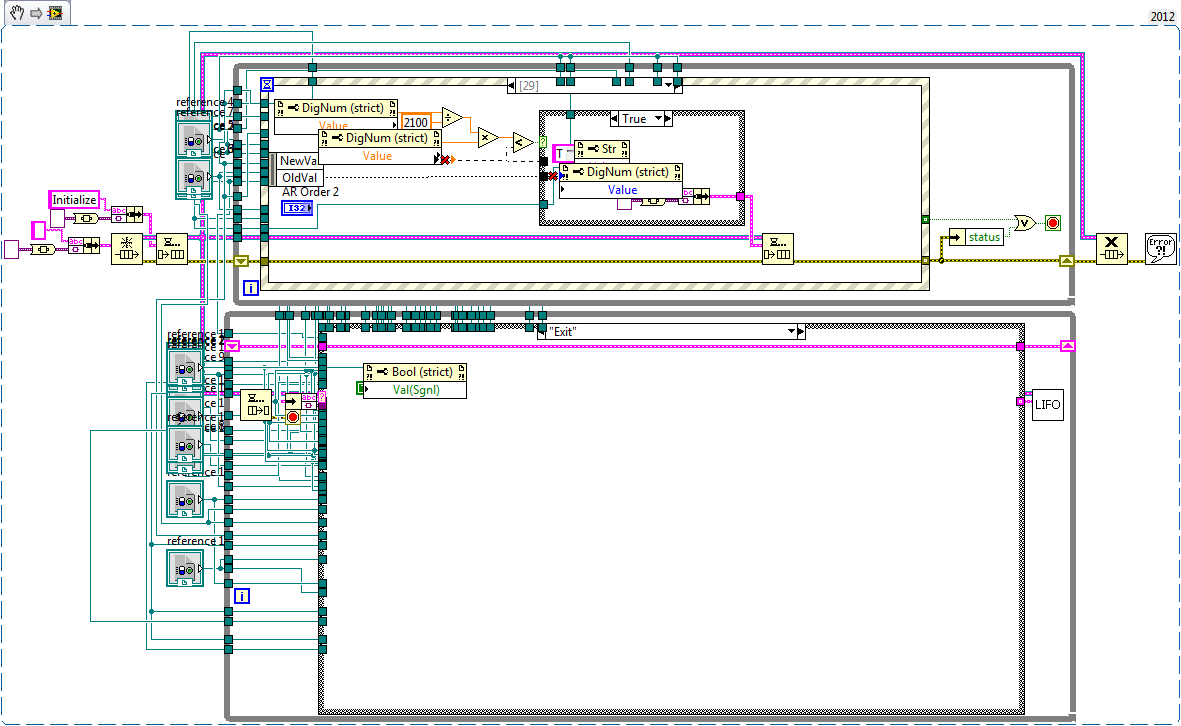
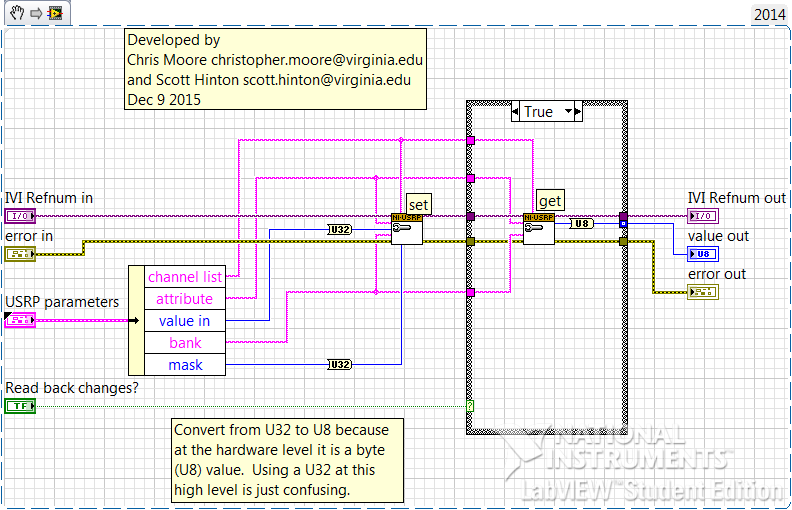 ..253
..253