
8-900-374-94-44

xn--e1aogju.xn--p1ai
xn--e1aogju.xn--p1ai
xn--e1aogju.xn--p1ai
Автоматическое регулирование — это управление технологическими процессами при помощи продвинутых устройств с заранее определенными алгоритмами.
В быту, например, автоматическое регулирование может осуществляться при помощи термостата, который измеряет и поддерживает комнатную температуру на заданном уровне.
 Автоматическое регулирование
Автоматическое регулированиеРекомендуем обратить внимание и на другие приборы для регулирования технологических процессов.
После того, как желательная температура задана, термостат автоматически контролирует комнатную температуру и включает или отключает нагреватель или воздушный кондиционер по мере необходимости, чтобы поддержать заданную температуру.
На производстве управление процессами обычно осуществляется средствами КИП и А, которые измеряют и поддерживают на необходимом уровне технологические параметры процесса, такие как: температура, давление, уровень и расход. Ручное регулирование на более-менее масштабном производстве затруднительно по ряду причин, а многие процессы вообще невозможно регулировать вручную.
Для нормального выполнения технологических процессов необходимо контролировать физические условия их протекания. Такие физические параметры, как температура, давление, уровень и расход могут изменяться по многим причинам, и их изменения влияют на технологический процесс. Эти изменяемые физические условия называются «переменными процесса».
Некоторые из них могут понизить эффективность производства и увеличить производственные затраты. Задачей системы автоматического регулирования является минимизация производственных потерь и затрат на регулирование, связанных с произвольным изменением переменных процесса.
На любом производстве осуществляется воздействие на сырьё и другие исходные компоненты для получения целевого продукта. Эффективность и экономичность работы любого производства зависит от того, как технологические процессы и переменные процесса управляются посредством специальных систем регулирования.
На тепловой электростанции, работающей на угле, уголь размалывается и затем сжигается, чтобы произвести тепло, необходимое для преобразования воды в пар. Пар может использоваться по множеству назначений: для работы паровых турбин, тепловой обработки или сушки сырых материалов. Ряд операций, которые эти материалы и вещества проходят, называется «технологическим процессом». Слово «процесс» также часто используется по отношению к индивидуальным операциям. Например, операция по размолу угля или превращения воды в пар могла бы называться процессом.
В случае системы автоматического регулирования наблюдение и регулирование производится автоматически при помощи заранее настроенных приборов. Аппаратура способна выполнять все действия быстрее и точнее, чем в случае ручного регулирования.
Действие системы может быть разделено на две части: система определяет изменение значения переменной процесса и затем производит корректирующее воздействие, вынуждающее переменную процесса вернуться к заданному значению.
Система автоматического регулирования содержит четыре основных элемента: первичный элемент, измерительный элемент, регулирующий элемент и конечный элемент.
 Элементы системы автоматического регулирования
Элементы системы автоматического регулированияПервичный элемент воспринимает величину переменной процесса и превращает его в физическую величину, которое передается в измерительный элемент. Измерительный элемент преобразовывает физическое изменение, произведенное первичным элементом, в сигнал, представляющий величину переменной процесса.
Выходной сигнал от измерительного элемента посылается к регулирующему элементу. Регулирующий элемент сравнивает сигнал от измерительного элемента с опорным сигналом, который представляет собой заданное значение и вычисляет разницу между этими двумя сигналами. Затем регулирующий элемент производит корректирующий сигнал, который представляет собой разницу между действительной величиной переменной процесса и ее заданным значением.
Выходной сигнал от регулирующего элемента посылается к конечному элементу регулирования. Конечный элемент регулирования преобразовывает получаемый им сигнал в корректирующее воздействие, которое вынуждает переменную процесса возвратиться к заданному значению.
В дополнение к четырем основным элементам, системы регулирования процессами могут иметь вспомогательное оборудование, которое обеспечивает информацией о величине переменной процесса. Это оборудование может включать такие приборы как самописцы, измерители и устройства сигнализации.
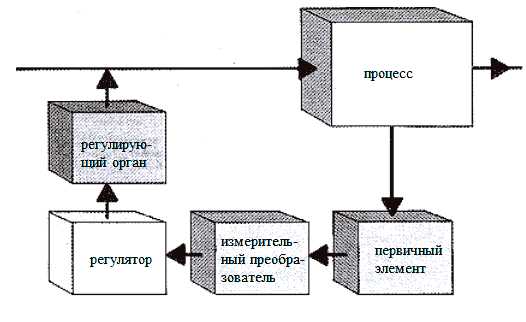
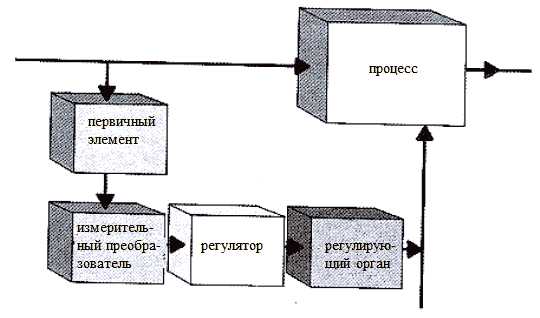
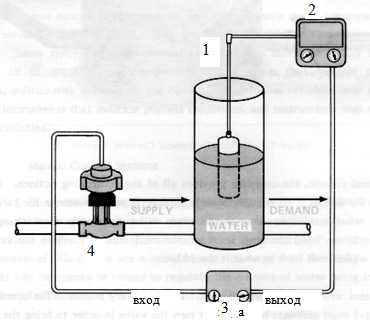 Схема простой системы автоматического регулирования
Схема простой системы автоматического регулированияИмеются два основных вида автоматических систем регулирования: замкнутые и разомкнутые, которые различаются по своим характеристикам и следовательно — по уместности применения.
В замкнутой системе информация о значении регулируемой переменной процесса проходит через всю цепочку приборов и устройств, предназначенных для контроля и регулирования этой переменной. Таким образом, в замкнутой системе производится постоянное измерение регулируемой величины, её сравнение с задающей величиной и оказывается соответствующее воздействие на процесс для приведения регулируемой величины в соответствие с задающей величиной.
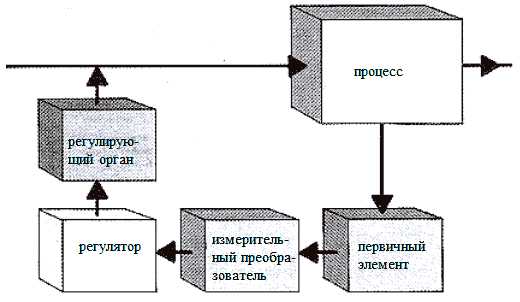
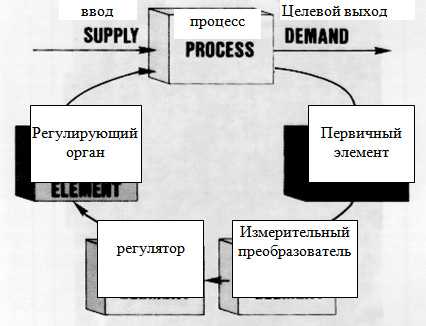 Схема замкнутой системы автоматического регулирования
Схема замкнутой системы автоматического регулированияНапример, подобная система хорошо подходит для контроля и поддержания необходимого уровня жидкости в резервуаре. Буек воспринимает изменение уровня жидкости. Измерительный преобразователь преобразует изменения уровня в сигнал, который отправляет на регулятор. Который, в свою очередь, сравнивает полученный сигнал с необходимым уровнем, заданным заранее. После регулятор вырабатывает корректирующий сигнал и отправляет его на регулирующий клапан, который корректирует поток воды.
В разомкнутой системе нет замкнутой цепочки измерительных и обрабатывающих сигнал приборов и устройств от выхода до входа процесса, и воздействие регулятора на процесс не зависит от результирующего значения регулируемой переменной. Здесь не производится сравнение между текущим и желаемым значением переменной процесса и не вырабатывается корректирующее воздействие.
Схема разомкнутой системы автоматического регулированияОдин из примеров разомкнутой системы регулирования — автоматическая мойка автомобилей. Это технологический процесс по мойке автомобилей и все необходимые операции чётко определены. Когда автомобиль выходит с мойки предполагается, что он должен быть чистым. Если автомобиль недостаточно чист, то система этого не обнаруживает. Здесь нет никакого элемента, который бы давал информацию об этом и корректировал процесс.
На производстве некоторые разомкнутые системы используют таймеры, чтобы гарантировать, что ряд последовательных операций выполнен. Этот вид разомкнутого регулирования может быть приемлем, если процесс не очень ответственный. Однако, если процесс требует, чтобы выполнение некоторых условий было проверено и при необходимости были бы сделаны корректировки, разомкнутая система не приемлема. В таких ситуациях необходимо применить замкнутую систему.
Системы автоматического регулирования могут создаваться на основе двух основных методов регулирования: регулирования с обратной связью, которое работает путем исправления отклонений переменной процесса после того, как они произошли; и с воздействием по возмущению, которое предотвращает возникновение отклонений переменной процесса.
Регулирование с обратной связью — это такой способ автоматического регулирования, когда измеренное значение переменной процесса сравнивается с ее уставкой срабатывания и предпринимаются действия для исправления любого отклонения переменной от заданного значения.
 Система ручного регулирования с обратной связью
Система ручного регулирования с обратной связьюОсновным недостатком системы регулирования с обратной связью является то, что она не начинает регулировки процесса до тех пор, пока не произойдет отклонение регулируемой переменной процесса от значения ее уставки.
Температура должна измениться, прежде чем регулирующая система начнет открывать или закрывать управляющий клапан на линии пара. В большинстве систем регулирования такой тип регулирующего действия приемлем и заложен в конструкцию системы.
В некоторых промышленных процессах, таких как изготовление лекарственных препаратов, нельзя допустить отклонение переменной процесса от значения уставки. Любое отклонение может привести к потере продукта. В этом случае необходима система регулирования, которая бы предвосхищала изменения процесса. Такой упреждающий тип регулирования обеспечивается системой регулирования с воздействием по возмущению.
Регулирование по возмущению — это регулирование с опережением, потому что прогнозируется ожидаемое изменение в регулируемой переменной и принимаются меры прежде, чем это изменение происходит.
Это фундаментальное различие между регулированием с воздействием по возмущению и регулированием с обратной связью. Контур регулирования с воздействием по возмущению пытается нейтрализовать возмущение прежде, чем оно изменит регулируемую переменную, в то время, как контур регулирования с обратной связью пытается отрабатывать возмущение после того, как оно воздействует на регулируемую переменную.
 Система регулирования с воздействием по возмущению
Система регулирования с воздействием по возмущениюСистема регулирования с воздействием по возмущению имеет очевидное преимущество перед системой регулирования с обратной связью. При регулировании по возмущению в идеальном случае величина регулируемой переменной не изменяется, она остается на значении ее уставки. Но ручное регулирование по возмущению требует более сложного понимания того влияния, которое возмущение окажет на регулируемую переменную, а также использования более сложных и точных приборов.
На заводе редко можно встретить чистую систему регулирования по возмущению. Когда используется система регулирования по возмущению, она обычно сочетается с системой регулирования с обратной связью. И даже в этом случае регулирование по возмущению предназначается только для более ответственных операций, которые требуют очень точного регулирования.
Одноконтурная система регулирования или простой контур регулирования — это система регулирования с одним контуром, который обычно содержит только один первичный чувствительный элемент и обеспечивает обработку только одного входного сигнала на регулятор.
 Одноконтурная система регулирования
Одноконтурная система регулированияНекоторые системы регулирования имеют два или больше первичных элемента и обрабатывают больше, чем один входной сигнал на регулятор. Эти системы автоматического регулирования называются «многоконтурными» системами регулирования.
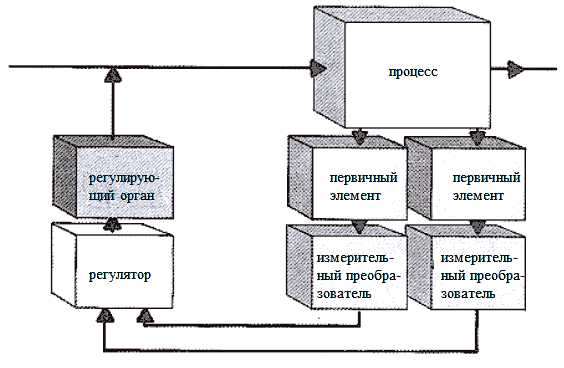 Многоконтурная система регулирования
Многоконтурная система регулированияkipiavp.ru
П-регулирование, оно же пропорциональное регулирование — это способ регулирования, основанный на законе пропорционального регулирования, при котором характеристики выходного сигнала пропорциональны характеристикам входного сигнала.
Другими словами, если вход пропорционального регулятора возрастет на некоторую величину, вывод регулятора увеличится на некоторую соответствующую величину и, если вход уменьшится, выход тоже уменьшится на соответствующую величину.
Обратите внимание на теорию автоматического регулирования и на приборы для регулирования.
Пропорциональный закон регулирования — это процесс регулирования, при котором относительное изменение регулирующего воздействия (выходного сигнала регулятора) пропорционально относительному отклонению регулируемой величины.
При пропорциональном регулировании ступенчатый сигнал на вводе приводит к ступенчатому изменению сигнала на выходе, а линейно изменяющийся сигнал на входе дает линейно изменяющийся сигнал на выходе. Иначе говоря, в пропорциональном регуляторе относительное изменение выходного сигнала (регулирующего воздействия) пропорционально относительному отклонению регулируемой величины (входного сигнала регулятора). Это позволяет устранить зону нечувствительности, характерную для двухпозиционного регулирования.
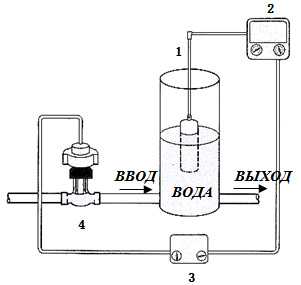 Простая система автоматического регулирования
Простая система автоматического регулированияКогда уровень воды в резервуаре изменяется, первичный чувствительный элемент (1) преобразовывает изменение в механическое движение. Механическое движение измеряется измерительным элементом (2) и преобразовывается в пневматический сигнал. Пневматический сигнал передается регулирующему элементу (регулятору) (3), который измеряет сигнал, сравнивает его с уставкой, вычисляет разность и вырабатывает сигнал управления (корректирующее воздействие), передаваемый к конечному элементу системы регулирования (4). Конечный элемент регулирования (в нашем примере пневматический регулирующий клапан) перемещается согласно выходному сигналу регулятора, изменяя приток воды в резервуар.
kipiavp.ru
Как было показано ранее, наиболее распространенная задача управления – поддержание заданных законов изменения во времени параметров объекта (регулирование). Устройство, осуществляющее управляющее воздействие, называется регулятором. Регуляторы включают в себя простые динамические звенья, комбинируя которые добиваются требуемых переходных характеристик системы управления при случайных воздействиях и изменении нагрузки. При этом входным параметром для регулятора является один или несколько показателей работы объекта:
величина и знак отклонения управляемого параметра от заданного значения (рассогласование) Δφ = φ-φ0
производная (скорость рассогласования
по времени)  ,
,
интеграл величины рассогласования во
времени  .
.
В зависимости от того, как формируется управляющее воздействие, различают законы управления и соответствующие им регуляторы:
релейные, реализующие нелинейный двухпозиционный закон управления
пропорциональные (статические, или устройства с жесткой обратной связью)
интегральные (астатические, устройства без обратной связи)
пропорционально-интегральные, (изодромные, или устройства с исчезающей обратной связью)
пропорционально-дифференциальные (статические устройства с предварением)
пропорционально-интегрально-дифференциальные (изодромные устройства с предварением).
Применительно к установкам с ДВС релейный закон управления реализуется в системах регулирования давления и уровня, с помощью двухпозиционного реле включаются и отключаются насосы и компрессоры. Чтобы избежать слишком частых пусков и остановок механизмов устанавливается определенный интервал между значениями управляемого параметра, соответствующего включению и отключению реле (зона нечувствительности).
Остальные законы управления реализуются в основном в регуляторах скорости.
График регулирования по релейному закону представлен на рис. 23.
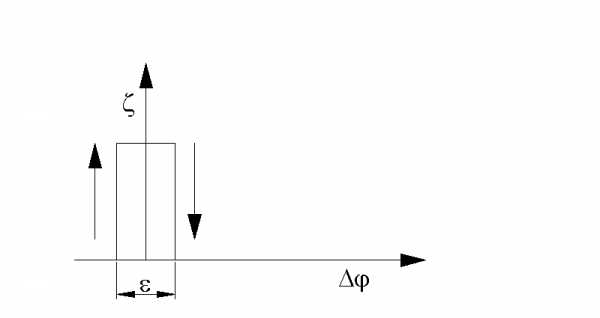
Рис.23
Пропорцинальные регуляторы вырабатывают управляющее воздействие в виде линейной зависимости от отклонения от отклонения регулируемого параметра:
ζ= -kpΔφ,
где kp– коэффициент усиления по регуляторному каналу.
Зависимость управляющего воздействия от отклонения регулируемого параметра показана на рис.24.
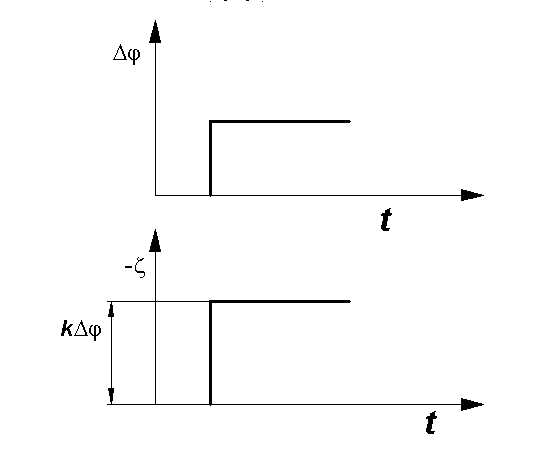
Рис.24
Так как в установившемся режиме определенной нагрузке должно соответствовать определенное положение регулирующего устройства, невозможно осуществлять регулирование во всем диапазоне нагрузок без определенной ошибки, называемой статизмом регулятора:
Интегральные регуляторы реализуют закон управляющего воздействия в виде формулы:
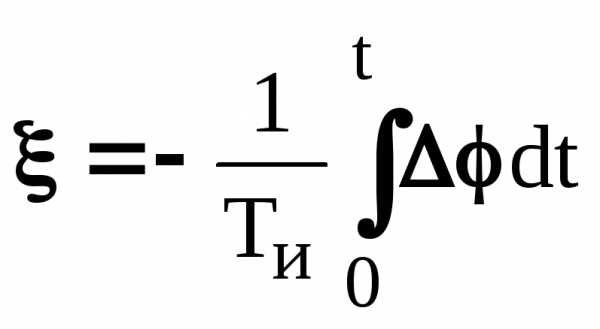 ,
,
где Ти– время интегрирования.
Интегральный регулятор может использоваться как предельный выключатель, предохраняющий систему от выхода за установленные допустимые пределы отклонения регулируемой величины в случае возникновения неисправности.
Всережимные регуляторы должны обеспечивать изменение регулируемой величины во всем диапазоне задаваемых значений независимо от нагрузки. В сумматор поступает сигнал по измерительному каналу от фактического значения параметра и по каналу задающего устройства. Чтобы улучшить характеристики переходного процесса при изменении режима или при случайных воздействиях, в регулирующие устройства вводят интегральное или дифференциальное звено или оба этих звена, работающих поочередно.
В пропорционально-интегральных регуляторах управляющее воздействие описывается уравнением:
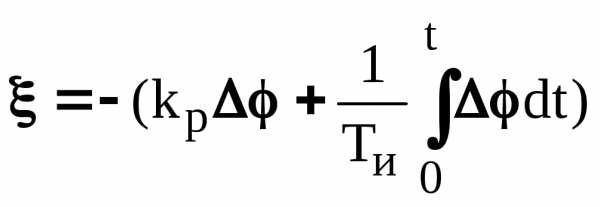 ,
,
где первое слагаемое определяет пропорциональную часть, а второе – интегральную.
В пропорционально-дифференциальных регуляторах управляющее воздействие описывается уравнением:
где Тд– время дифференцирования.
Такие регуляторы позволяют временно увеличить величину управляющего воздействия и сократить время выхода на новый установившийся режим.
В пропорционально-дифференциальных-интегральных регуляторах управляющее воздействие описывается уравнением:
Такие регуляторы позволяют добиться наилучших показателей переходного процесса путем и добиться нулевого отклонения регулируемой величины от заданного значения во всем диапазоне нагрузок.
Все перечисленные виды регуляторов первоначально были реализованы в отечественной промышленности в виде приборов и агрегатов универсальной системы элементов промышленной пневмоавтоматики (УСЭППА). Недостатком этих приборов являлось наличие калиброванных отверстий и каналов малого диаметра, которые могли засоряться при некачественной подготовке рабочей среды (воздуха). В настоящее время применяются электронные регуляторы, в которых операции дифференцирования и интегрирования выполняются с помощью электронных схем и микропроцессоров.
Ранее существовали другие виды классификации регуляторов.
По способу энергетического воздействия измерительной части регулятора на его исполнительную часть регуляторы делятся на два класса: регуляторы прямого и непрямого действия. На рис.25 а показана блок-схема системы управления с регулятором прямого действия, на рис 25 б – с регулятором непрямого действия.
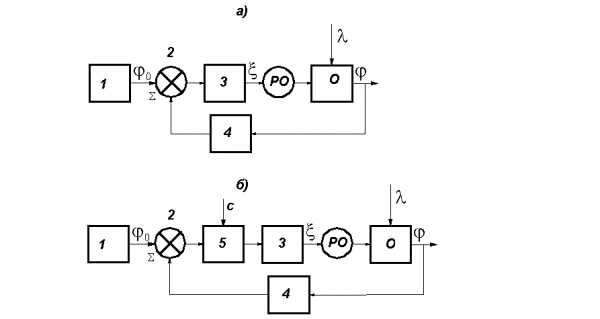
Рис. 25
1- элемент задания, 2 – элемент сравнения, 3 – исполнительный механизм, 4 – чувствительный элемент, 5 – усилитель, РО – регулирующий орган, О — объект
Регулятор прямого действия состоит из измерительного устройства, (включающего чувствительный элемент 4, элемент задания 1 и элемент сравнения 2), и исполнительного механизма 4, осуществляющего перестановку регулирующего органа в нужном направлении. Исполнительный механизм должен обладать вполне определенным выходным (или, как принято называть, перестановочным) усилием для перемещения РО. В регуляторе прямого действия необходимое перестановочное усилие вырабатывается чувствительным элементом.
В случае, когда нельзя спроектировать компактный чувствительный элемент, развивающий необходимое усилие, в конструкцию регулятора вводится усилитель 5, использующий дополнительную внешнюю энергию (с) для усиления мощности измерителя. Такой регулятор называется регулятором непрямого действия.
По способу обеспечения задачи регулирования регуляторы делились на следующие классы:
астатические регуляторы
статические регуляторы
программные регуляторы
двухпозиционные регуляторы.
На примерах простейших регуляторов давления можно понять отличие в конструкции статических и астатических регуляторов. На рис. 26 показан астатический регулятор давления.
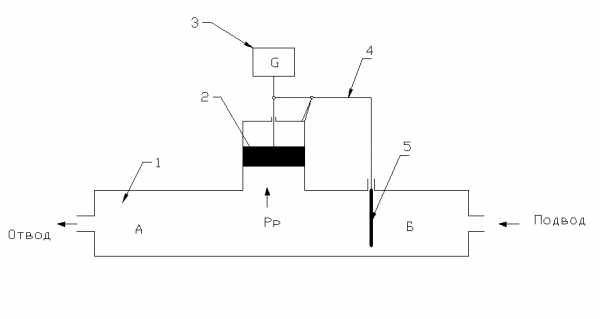
Рис. 26 Астатический регулятор давления
1 – регулируемый объект, 2 – поршень (чувствительный элемент), 3 – груз (элемент задания и элемент сравнения), 4 – передаточный рычаг (исполнительный механизм), 5 – шибер (регулирующий орган )
В потоке газа имеется регулирующее устройство 5 с изменяемым сопротивлением, благодаря которому при переменном давлении на подводе можно поддерживать постоянное давление в полости А. В равновесном режиме имеется баланс между подводом и отводом газа, давление в рабочей полости А соответствует расчетному значению Рри уравновешивается грузомG. При изменении нагрузки (отвода) баланс нарушается и в зависимости от характера наступившего изменения уменьшается или увеличивается давление в полости А. Поршень (чувствительный элемент начинает перемещаться, открывая или закрывая шибер. Когда вновь будет достигнуто исходное значение Рр, может наступить равновесие при новой нагрузке. Однако получить новое устойчивое равновесие без постоянных колебаний далеко не всегда удается. Это основной недостаток астатических регуляторов.
В статическом регуляторе (рис. 27) элементом задания является верхняя опора пружины 4, элементом сравнения является пружина 3. Величина усилия, действующая на поршень со стороны пружины, меняется в зависимости от положения поршня по высоте. Из-за этого возникает не одно, как в предыдущем случае, а множество равновесных состояний по давлению. Так, если давление Р начало возрастать, поршень, поднимаясь и сжимая пружину, может занять новое положение, при котором возросшему давлению будет отвечать возросшее усилие пружины. Таким образом, статический регулятор с заведомо предусмотренной статической ошибкой. Значение поддерживаемого параметра однозначно связано с величиной нагрузки.
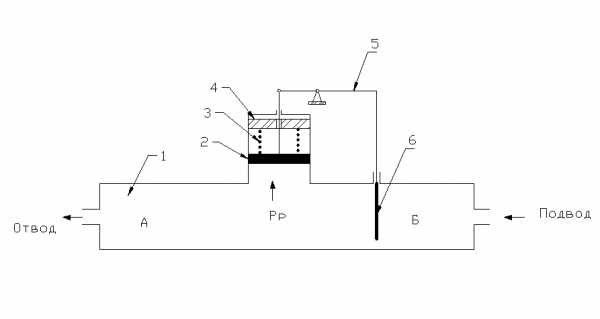
Рис. 27 Статический регулятор давления
1 – регулируемый объект, 2 – поршень (чувствительный элемент), 3 – пружина (элемент сравнения), 4 – верхняя опора пружины (элемент сравнения), 5 — передаточный рычаг (исполнительный механизм), 6 – шибер (регулирующий орган )
В программных регуляторах предусматривается дополнительный конструктивный элемент, изменяющий координату задания, а, следовательно, и регулируемую величину, по определенной функциональной зависимости от нагрузки, от времени или от других величин.
В двухпозиционных регуляторах реализуется релейный закон управления. Регуляторы этого типа работают по принципу включено – выключено.
studfiles.net
На практике находят применение следующие способы регулирования уровня:
1. Изменением расхода жидкости на входе в аппарат – регулирование на притоке (рисунок 28)
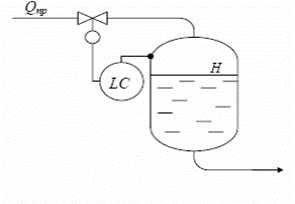
Рисунок 28. Управление уровнем на притоке
2. Изменением расхода на выходе аппарата – регулирование на стоке (рисунок 29).
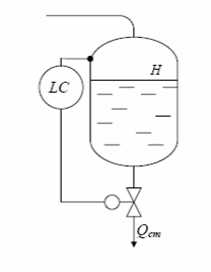
Рисунок 29. Управление уровнем на стоке
Очевидно, что указанные два способа применимы, когда по условиям работы аппарата в технологической схеме имеется возможность изменения расходов на притоке или стоке.
3. Соотношением расходов на притоке и стоке (см. рисунок 30).
В данном случае для регулирования уровня используется каскадная АС с промежуточной величиной – соотношением расходов на притоке и стоке (FFC – стабилизирующий регулятор соотношения расходов). Каскадная АС позволяет повысить качество регулирования уровня по сравнению с одноконтурными.
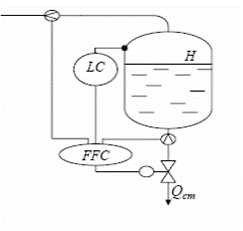
Рисунок 30. Комбинированное управление уровнем
13. Модель OPC. Назначение OPC. Текущие стандарты OPC. Привести пример OPC взаимосвязи контроллера и компьютера (SCADA) АСУТП.
OPC это набор спецификаций стандартов. Каждый стандарт описывает набор функций определенного назначения. Текущие стандарты:
OPC DA (Data Access)
Это основной и наиболее востребованный стандарт. Описывает набор функций обмена данными в реальном времени с ПЛК, РСУ, ЧМИ, ЧПУ и другими устройствами.
OPC AE (Alarms & Events)
Предоставляет функции уведомления по требованию о различных событиях: аварийные ситуациии, действия оператора, информационные сообщения и другие.
OPC Batch
Предоставляет функции шагового и рецептурного управления технологическим процессом (в соответствии с стандартом S88.01)
OPC DX (Data eXchange)
Предоставляет функции организации обмена данными между OPC-серверами через сеть Ethernet. Основное назначение — создание шлюзов для обмена данными между устройствами и программами разных производителей.
OPC HDA (Historical Data Access)
В то время как OPC Data Access предоставляет доступ к данным изменяющимся в реальном времени, OPC Historical Data Access предоставляет доступ к уже сохраненным данным.
OPC Security
Определяет функции организации прав доступа клиентов к данным системы управления через OPC-сервер.
OPC XML-DA (XML-Data Access)
Предоставляет гибкий, управляемый правилами формат обмена данными через SOAP и Web.
OPC UA (Unified Architecture)
Новая спецификация, которая не основана на технологии Microsoft COM, что предоставляет кросс-платформенную совместимость.
Назначение
Стандарт OPC разрабатывался с целю сократить затраты на создание и сопровождение приложений промышленной автоматизации. В начале 90-ых у разработчиков промышленного ПО возникла потребность в универсальном инструменте обмена данными с устройствами разных производителей или по разным протоколам обмена данными. Суть OPC проста — предоставить разработчикам промышленных программ универсальный фиксированный интерфейс (то есть набор функций) обмена данными с любыми устройствами. В то же время разработчики устройств предоставляют программу реализующую этот интерфейс (набор функций).
Пример использования
Технология OPC очень широко используется в АСУТП, так как она существенно облегчает жизнь разработчикам ситем автоматизации. Как правило, всё, что требуется разработчику при использовании OPC — это подключить к компьютеру преобразователь интерфейсов, через него — промышленный контроллер, выполнить простейшие манипуляции в SCADA-системе — и всё. Связь есть! При этом совершенно не обязательно углубляться в изучение протоколов, интерфейсов и прочей тяжёлой для понимания информации.
SCADA-система Reliance, как и большинство других подобных систем, позволяет выполнять обмен данными с любыми контроллерами через OPC-сервер. SCADA-система — это OPC-клиент. Разумеется, для данного контроллера должен иметься и быть установлен на компьютере OPC-сервер. Как правило, скачать OPC-сервер бесплатно можно на сайте разработчика контроллера. Некоторые разработчики SCADA-систем предоставляют свои OPC-серверы для различных контроллеров, однако обычно они поставляются за отдельную плату.
Основные этапы проектирования обмена данными через OPC-сервер в Reliance следующие:
· Создать устройство
· Получить переменные из OPC-сервера
· Добавить устройство в проект
· Связать переменные с компонентами проекта
В документе, который вы можете скачать на этой странице, все эти этапы рассмотрены более подробно. В качестве примера используется бесплатный OPC-сервер CoDeSys. Процесс создания проекта в Reliance здесь не рассматривается, так как не имеет отношения непосредственно к работе с OPC-сервером. Как создать проект в Reliance, см. здесь: Reliance 3: Первые шаги
Рекомендуемые страницы:
lektsia.com