
8-900-374-94-44

ПРОПОРЦИОНАЛЬНОИНТЕГРАЛЬНЫЕ РЕГУЛЯТОРЫ
Статическую ошибку, возникающую при пропорциональном регулировании,
можно исключить, если кроме пропорционального ввести еще и интегральное звено. Последнее образуется путем постоянного суммирования ε за определенный промежуток времени и формирования сигнала управления, пропорционального полученной величине.
Математически этот процесс может быть описан следующей зависимостью:
где – коэффициент пропорциональности интегральной составляющей, а
Тu ‘ постоянная времени интегрирования, параметр настройки регулятора.
Если 0, то даже при незначительных отклонениях регулируемой величины сигнал со временем может достичь любой величины, что приведет к перемещению регулирующего органа до момента, пока ε не станет равным 0.
Рассмотрим физический смысл постоянной времени интегрирования. Предположим, что на вход регулятора поступил сигнал , а пропорциональная составляющая отсутствует (= 0). При этом выходной сигнал будет меняться по закону
По истечении времени t = значение выходного сигнала будет равно
(рис.1.13а).
Таким образом, постоянная времени интегрирования в ПИ-регуляторе равна времени, в течение которого с момента поступления на вход регулятора постоянного сигнала сигнал на выходе регулятора достигнет значения, равного значению входного сигнала.
Переходной процесс в ПИ-регуляторе показан на рис.1.13б. Устраняя статическую ошибку интегральный регулятор, однако, ухудшает качество переходного процесса. Поэтому на практике применяют комбинированные ПИ-регуляторы.
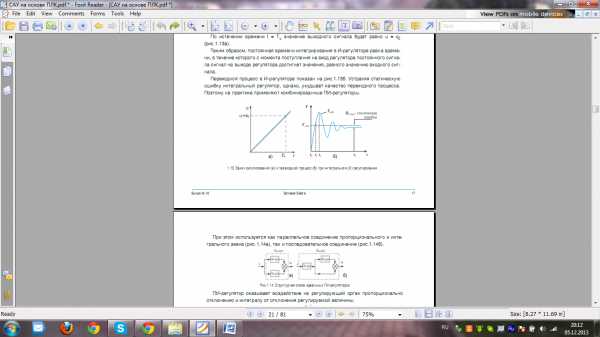
Рисунок 1 — Закон регулирования (а) и переходной процесс (б) при интегральном (И) регулировании.
При этом используется как параллельное соединение пропорционального и интегрального звена (рис.2а), так и последовательное соединение (рис.2б).
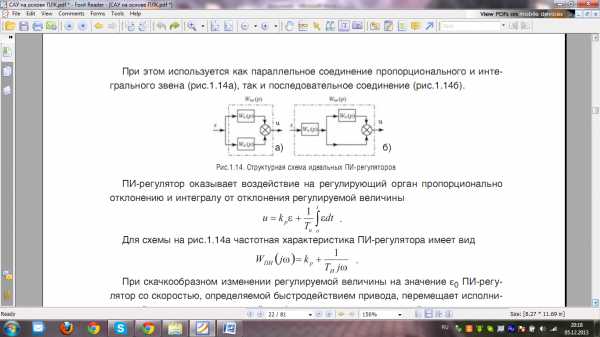
Рисунок 2 — Структурная схема идеальных ПИ-регуляторов.
ПИ-регулятор оказывает воздействие на регулирующий орган пропорционально отклонению и интегралу от отклонения регулируемой величины.
Для схемы на рисунке 2а частотная характеристика ПИ-регулятора имеет вид :
При скачкообразном изменении регулируемой величины на значение ε0 ПИ-регулятор со скоростью, определяемой быстродействием привода, перемещает исполнительный механизм на величину (), после чего исполнительный механизм дополнительно перемещается в ту же сторону со скоростью, пропорциональной отклонению регулируемой величины. Следовательно, в ПИ-регуляторе при отклонении регулируемой величины от заданного значения мгновенно срабатывает пропорциональная (статическая) составляющая регулятора, а затем постепенно увеличивается интегральная (астатическая) составляющая регулятора.
Переходная характеристика ПИ-регулятора для параллельного соединения на рисунке 2а показана на рисунке 3(прямая 1).
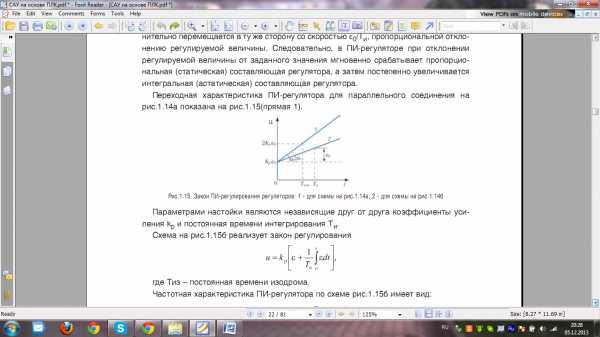
Рисунок 3 — Закон ПИ-регулирования регуляторов: 1 — для схемы на рисунке2а, 2 — для схемы на рисунке 2б.
Параметрами настойки являются независящие друг от друга коэффициенты усиления и постоянная времени интегрирования.
Схема на рисунке 3б реализует закон регулирования
где – постоянная времени изодрома.
Частотная характеристика ПИ-регулятора по схеме рисунке 3б имеет вид:
Таким образом, ПИ-регулятор со структурной схемой, приведенной на рисунке 3б, имеет взаимосвязанные параметры настройки статической и астатической частей по коэффициенту . Так, при настройке коэффициента усилениябудет изменяться и постоянная времени интегрирования:
Рассмотрим физический смысл постоянной времени изодрома . Предположим, что на вход регулятора поступил постоянный сигнал. Тогда
При поступлении на вход регулятора сигнала в начальный момент сработает пропорциональная составляющая и на выходе регулятора появится сигнал. В дальнейшем линейно начинает нарастать выходной сигнал от интегральной составляющей и придостигнет значения.
–это время, в течение которого от начала действия интегральной (астатической) составляющей регулятора пропорциональная (статическая) составляющая удваивается. Переходной процесс при ПИ-регулировании показан на рисунке 4.

Рисунок 4 — Переходной процесс при пропорционально-интегральном регулировании.
ПИ-регулятор обеспечивает нулевую ошибку в установившемся состоянии.
Варианты структурных схем промышленных ПИ-регуляторов приведены на
Рисунке 5.

Рисунок 5 — Структурные схемы промышленных ПИ-регуляторов.
Выбирая ту или иную схему, можно подобрать наиболее подходящую структуру для Вашей задачи.
Рассмотрим следящую систему управления зеркалом телескопа, представленную на рисунке 6:
Исходные данные:Электромеханическая постоянная времени ДПТ — Тм = 0.3 с
Постоянная времени якоря ДПТ — Тя = 0.015 с
Постоянная времени короткозамкнутой цепи ЭМУ — Ткз = 0.06 с
Постоянная времени цепи управления ЭМУ — Ту = 0.007 с
Постоянные времени последовательного корректирующего устройства:
T1 = 7.69 с
T2 = 2 с
T3 = 0.25 с
T4 = 0.059 с
T5 = 0.016 с
T6 = 0.007 с
T7 = 0.003 с
T8 = 0.281 с
T9 = 0.016 с
Коэффициент усиления скорректированной системы — Кsk = 77
Коэффициент усиления нескорректированной системы — Кnesk = 5
Коэффициент усиления ЭМУ — КЭМУ = 7
Коэффициент передачи редуктора — Кр = 0.075
Коэффициент усиления разомкнутой системы по возмущению — Кf= 0.039
Время регулирования — tp = 1 с
Показатель колебательности — M = 1.2
Для составления функциональной схемы САР необходимо знать все элементы, из которых состоит система.
В следящей системе управления зеркалом телескопа используются сельсин-датчик СД, сельсин-приемник СП, фазочувствительный выпрямитель ФЧВ, электромашинный усилитель ЭМУ, двигатель постоянного тока ДПТ и редуктор Р.
Функциональная схема системы автоматического регулирования представлена на рисунке 7:
Рисунок 7 – Функциональная схема
Принцип работы системы.
Система находится в покое, когда заданное и фактическое положение телескопа соответствуют друг другу.
Для измерения угла рассогласования следящей системы применяются сельсины, работающие в трансформаторном режиме.
При повороте ротора сельсина-датчика на угол вх на выходе сельсина-приемника создается напряжение соответствующей фазы и амплитуды.
Выходной сигнал сельсина-приемника поступает на фазочувствительный выпрямитель, задачей которого является преобразование входного переменного напряжения в постоянный ток, причем полярность выходного напряжения определяется фазой входного напряжения.
Выходной сигнал выпрямителя воздействует на обмотку управления электромашинного усилителя. Двигатель через редуктор воздействует на зеркало телескопа и управляет положением однофазной обмотки сельсина-приемника (ротор сельсина-приемника с помощью обратной связи возвращается в согласованное положение с ротором сельсина датчика и двигатель останавливается).
Если заданное и фактическое положения зеркала телескопа совпадают, то положения однофазных обмоток сельсинов одинаковы и система находится в покое. В противном случае система будет находиться в движении.
Процесс регулирования выглядит следующим образом:
вх (= вх — вых) Uоу iоу Uдв nдв вых
(= вх — вых)
Структурная схема системы автоматического регулирования приведена на рисунке 8.
Передаточная функция скорректированной системы имеет вид:
Передаточная функция скорректированной замкнутой системы имеет вид:
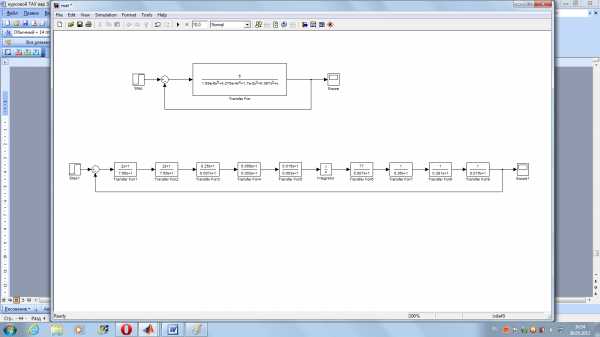
Схема, построенная в среде Matlab для нескорректированной системы (рисунок 9):
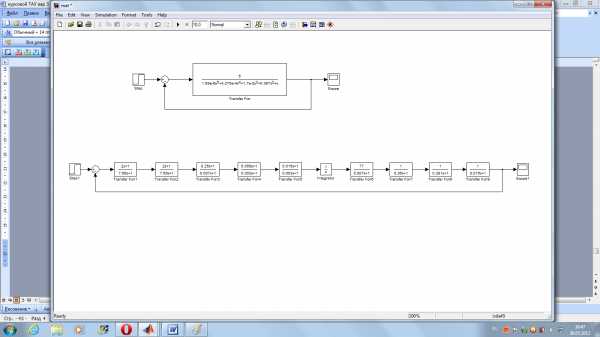
Рисунок 9 – Схема нескорректированной системы
Переходный процесс нескорректированной системы (рисунок 10):
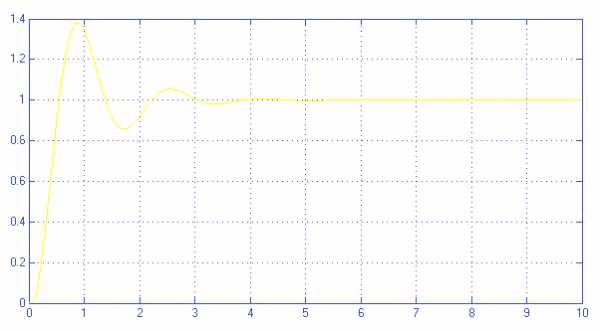
Рисунок 10 – График переходного процесса нескорректированной системы
Схема, построенная в среде Matlab для скорректированной системы (рисунок 11):
Переходный процесс скорректированной системы (рисунок 12):
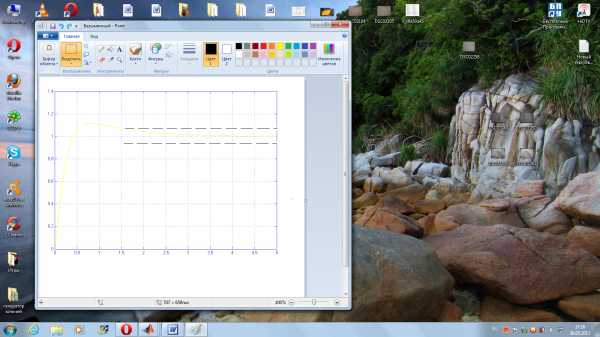
Рисунок 12 — График переходного процесса скорректированной системы
Схема САУ с ПИ-регулятором выглядит следующим образом:
Рисунок 13 – Схема САУ
Строим и моделируем схему в Matlab для передаточной функции.
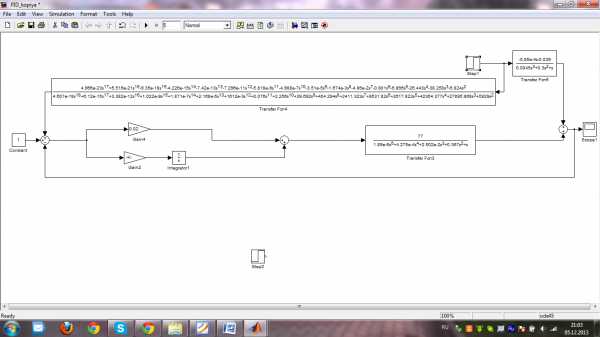
Рисунок 14 — Схема с ПИ-регулятором.
Переходный процесс САУ с ПИ-регулятором представлен на рисунке 15:
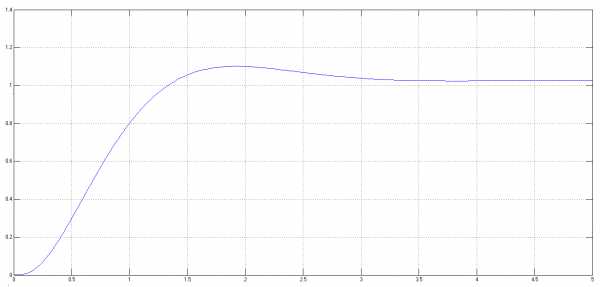
Рисунок 15 – переходный процесс.
П-регулятор — Это регулятор, у которого μ пропорционально σ, т.е.μ = – Кσ.
При скачке входной величины σ на значение (–10ºС) затвор регулирующего органа переходит в новое μ — положение скачком (рис.2.10).
Рис.2.10. Закон регулирования П-регулятора.
Достоинство такого регулирования: регулирующий орган быстро перемещается на новое положение, т.е. высокая скорость регулирования (t – время).
Недостаток: имеет место остаточное отклонение, т.е. имеет место некоторая ошибка регулирования.
И-регулятор Это регулятор, у которого μ пропорционально интегралу σ
При скачке входной величины на значение (–10ºС) затвор регулирующего органа медленно переходит в новое положение (рис.2.11).
Рис.2.11. Закон регулирования И-регулятора.
Достоинство:отсутствие остаточного отклонения регулируемого параметра от зад-го знч-я.
Недостаток: низкая скорость рег-я, т.е. затвор в новое положение перемещается медленно.
ПИ-регулятор – это параллельное соединение предыдущих двух регуляторов (П и И — регуляторов). Этот регулятор сочетает положительные моменты П и И -регуляторов. У ПИ-регулятора (рис.2.12) регулирующее воздействие μ перемещает затвор пропорционально отклонению параметра σ и интегралу отклонения σ.
,где: К, Ти – параметры настройки регулятора. Как видим, формула данного закона – это сумма двух предыдущих формул. Затвор регулирующего органа часть пути пройдет скачком по П-закону, а оставшуюся часть – медленно по И — закону.
Рис.2.12. Закон регулирования ПИ-регулятора
Регуляторы с предварением
ПД-регулятор — это такой регулятор (рис.2.13), у которого выходной сигнал μ пропорционален входному сигналу σ и производной dσ/dt, т.е..
Рис.2.13. Закон регулирования ПД-регулятора.
Производная dσ/dt характеризует тенденцию изменения (отклонения) регулируемой величины. Величина и знак воздействия от производной позволяют регулятору как бы предвидеть в какую сторону и на сколько отклонилась бы регулируемая величина под действием данного возмущения. Это предвидение позволяет регулятору предварять своим воздействием возможное отклонение регулируемой величины. В результате процесс регулирования завершается в более короткое время.
Сначала затвор скачком переходит из точки а в точку в (П – закон), т.е. больше чем надо, затем отскакивает назад в точку б (дифференциальное действие), и остаётся в этом положении.
ПИД-регулятор.
У него 3 родителя: П-регулятор, И-регулятор, ПД-регулятор. Соответственно складываются 3 формулы (рис.2.14.)
.
Здесь: К, Ти, Тд – параметры настройки, которые можно настроить вручную.
Рис.2.14. Закон регулирования ПИД-регулятора.
ПИД — закон используется во всех контроллерах. Сначала затвор скачком переходит из точки а в точку в (П – закон), т.е. больше чем надо, затем отскакивает назад в точку б (дифференциальное действие), а далее затвор медленно перемещается в конечное положение (И – закон). В результате процесс регулирования завершается в более короткое время и с меньшей погрешностью регулирования.
studfiles.net
П, ПД, ПИ, ПИД регуляторы. Они же P, PD, PI, PID регуляторы.
Во первых, упомянем, что сами понятия П, ПД, ПИ, ПИД (P, PD, PI, PID) регуляторы являются неким сокращением от понятия: «устройство регулирования (черный ящик) обеспечивающие на своем выходе обратную связь регулируемого параметра, или его изменения, описываемую передаточной функцией типа П, ПИ и т.д……. «. При этом:
Очень важное замечание — в подавляющем большинстве случаев эти регуляторы обеспечивают отрицательную обратную связь изменения регулируемого параметра на регулирующий параметр (воздействие). Для ясности в данной статье мы будем говорить о регулировании комнатной температуры (поддержании ее значения X градусов) с помощью некоего комнатного электронагревателя, выходная мощность которого зависит от уровня входного сигнала. Т.е. при изменении температуры на некую положительную величину e (при повышении температуры до уровня X+e) к стандартному входному сигналу U нагревателя будет добавлен отрицательный сигнал регулятора u. Результирующим сигналом на входе нагревателя будет, таким образом, U-u , что уменьшит выходную мощность нагревателя, и, следовательно, комнатную температуру.
Очень часто e называют «ошибкой» или «отклонением», Х — «заданным уровнем» или «заданным значением», причем Х, в общем случае, может быть и регулируемым сигналом в каком-то другом контуре регулирования. ! Во избежания автоколебательных явлений желательно, чтобы «верхний» контур регулирования был «медленным» по отношению к нижнему!
Рассмотрим работу ПИД (PID) регулятора, как наиболее универсального представителя класса. Любой другой может быть получен путем обнуления коэффициента передачи при соответствующем слагаемом передаточной функции. Итак,
Передаточная функция ПИД регулятора описывается уравнением:
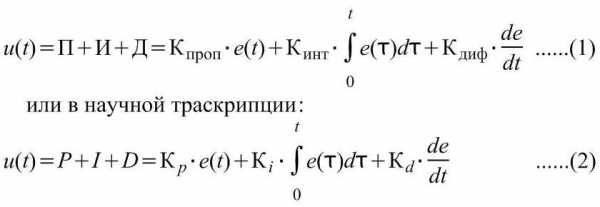
где «тау» — время с того момента, как изменение e регулируемой величины стало отличным от нуля (значимо отличным), а жаргон инженеров-автоматчиков еще требует нижеследующих названий для компонент уравнения и их производных величин:
Очевидно, что функция содержит 3 слагаемых, первое — пропорциональное к изменению заданного параметра, второе — интегральное, а третье — дифференциальное . В дальнейшем будем использовать в рассуждениях обозначения из уравнения (2). Рассмотрим, что это такое по порядку:
Пропорциональное регулирование (П или P регуляторы) : — величина поправки в регулирующее воздействие пропорциональна величине отклонения. Логично, чем больше отклонение температуры в компате от заданного уровня, тем сильнее следует изменить мощность нагревателя для компенсации изменения. Передаточная функция П (P) регулятора описывается уравнением: u(t)=P (коэффициенты Kd и Ki уравнения (2) равны нулю).
Интегральное регулирование: — величина поправки в регулирующее воздействие зависит от накопленного действия отклонения регулируемой величины. Спокойно, тут ничего нет сложного. Рассмотрим наш пример -если в комнате низкая температура недопустима, ибо на подоконнике находятся ценные теплолюбивые кактусы, а какой-то клоун открыл окно зимой, то пропорциональное регулирование в силу разумности своих настроек попросту не позволяет прогреть комнату. Если накопленное действие пониженной температуры растет (интеграл от изменения) , то это слагаемое даст дополнительное приращение мощности нагревателя.
Дифференциальное регулирование: — величина поправки в регулирующее воздействие зависит от скорости изменения регулируемого параметра. Тут ничего сложного нет, поскольку — если, например, температура на улице резко упала, то лучше поскорее прогреть комнату и стены, и не дать им набрать влажность. ! В гидравлических системах и в системах, имеющих собственные частоты колебаний близкие к характерным временам запуска процессов регулирования, данный вид регулирования малоприменим, так как легко вызывает гироудары или резонансы!
ПД или PD регуляторы, описать просто: Передаточная функция П (P) регулятора описывается уравнением: u(t)=P+D (коэффициент Ki уравнения (2) равен нулю).
ПИ или PI регуляторы описываются тоже просто: Передаточная функция П (P) регулятора описывается уравнением: u(t)=P+I (коэффициент Ki уравнения (2) равен нулю).
Уравнение (2), для целей упрощения настройки часто может быть записано как:
тут нет никакого подвоха, все то же самое, просто другая запись.
tehtab.ru
Особенности П, ПИ и ПИД регулирования
 Наличие в приборах функции выходного устройства ПИД регулирования подразумевает возможность реализации трех типов регулирования: П-, ПИ- и ПИД регулирования.
Наличие в приборах функции выходного устройства ПИД регулирования подразумевает возможность реализации трех типов регулирования: П-, ПИ- и ПИД регулирования.
П регулирование. Выходная мощность прямопропорциональна ошибке регулирования. Чем больше коэффициент пропорциональности, тем меньше выходная мощность при одной и той же ошибке регулирования. Пропорциональное регулирование можно рекомендовать для малоинерционных систем с большим коэффициентом передачи. Для настройки пропорционального регулятора следует сначала установить коэффициент пропорциональности максимальным, при этом выходная мощность регулятора уменьшится до нуля. После стабилизации измеренного значения, следует установить заданное значение и постепенно уменьшать коэффициент пропорциональности, при этом ошибка регулирования будет уменьшаться. Когда в системе возникнут периодические колебания, коэффициент пропорциональности следует увеличить так, чтобы ошибка регулирования была минимальной, а периодические колебания максимально уменьшились.
ПИ регулирование. Выходная мощность равна сумме пропорциона- льной и интегральной составляющих. Чем больше коэффициент пропор- циональности, тем меньше выходная мощность при одной и той же ошибке регулирования, чем больше постоянная времени интегрирования, тем медленее накапливается интегральная составляющая. ПИ регулирование обеспечивает нулевую ошибку регулирования и нечувствительно к помехам измерительного канала. Недостатком ПИ регулирования является медленная реакция на возмущающие воздействия. Для настройки ПИ регулятора следует сначала установить постоянную времени интегрирования равный нулю, а коэффициент пропорциональности — максимальным. Затем как при настройке пропорционального регулятора, уменьшением коэффициента пропорциональности нужно добиться появления в системе незатухающих колебаний. Близкое к оптимальному значение коэффициента пропорциональности будет в два раза больше того, при котором возникли колебания, а близкое к оптимальному значение постоянной времени интегрирования — на 20% меньше периода колебаний.
ПИД регулирование. Выходная мощность равна сумме трех состав- ляющих: пропорциональной, интегральной и дифференциальной. Чем больше коэффициент пропорциональности, тем меньше выходная мощность при одной и той же ошибке регулирования, чем больше постоянная времени интегрирования, тем медленее накапливается интегральная составляющая, чем больше постоянная времени дифференцирования, тем сильнее реакция системы на возмущающее воздействие. ПИД-регулятор применяется в инерционных системах с относительно малым уровнем помех измерительного канала. Достоинством ПИД регулятора является быстрый выход на режим, точное удержание заданной температуры и быстрая реакция на возмущающие воздействия. Ручная настройка ПИД является крайне сложной, поэтому рекомендуется использовать функцию автонастройки.
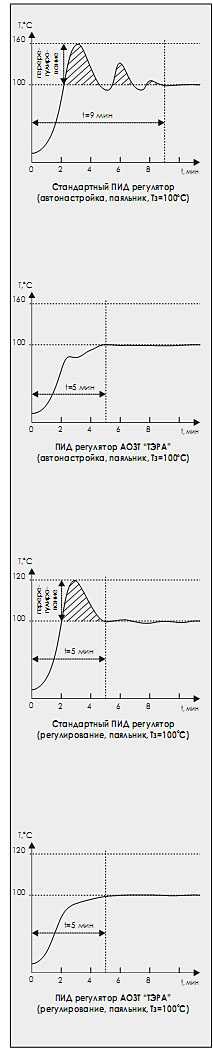
Автонастройка ПИД регулирования в приборах ЧАО “ТЭРА”:
Главное, что определяет качество ПИД регулятора — это его способность точно и быстро выходить на заданную температуру, для чего у всех современных ПИД регуляторов обязательно присутствует функция автонастройки. Стандартных алгоритмов автонастройки ПИД не существуют, на практике каждый производитель применяет свой собственный алгоритм. Поэтому, пользователь, приобретая один и тот же товар под названием “ПИД регулятор” у разных производителей, на своем объекте может получить совсем разные результаты их применения. Основными достоинствами алгоритма автонастройки в ПИД регуляторах ЧАО “ТЭРА” являются:
Автонастройку можно производить при любом стабильном состоянии объекта регулирования. Кроме того, чем больше разность между начальной и заданной температурой, тем точнее определяются коэффициенты ПИД регулятора. Все коэффициенты ПИД хранятся в энергонезависимой памяти прибора.
Автонастройку необходимо повторить, если:
www.ao-tera.com.ua
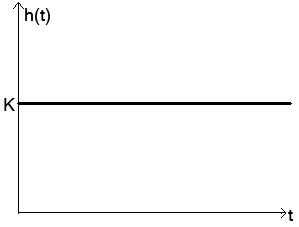
П-регулятор представляет собой одно из самых простых и распространенных устройств и алгоритмов управления. П-регулятор – это устройство в обратной связи, которое формирует управляющий сигнал. П-регулятор выдает выходной сигнал, пропорциональный входному, с коэффициентом пропорциональности К.
Выходной сигнал, вырабатываемый пропорциональной частью П-регулятора , противодействует отклонению регулируемой величины от данного значения, которое наблюдается в данный момент. Выход П-регулятор выдаст тем больше, чем больше отклонение.
Если П-регулятор имеет входной сигнал, который равняется заданному значению, то выходной равен 0.
П-регулятор имеет существенный недостаток в том, что при его использовании значение регулируемой величины никогда не стабилизируется на заданном значении. Все из-за так называемой статической ошибки. Она равна отклонению регулируемой величины, которая дает такой выходной сигнал, который стабилизирует выходную величину именно на данном значении. Это важно учитывать при выборе закона регулирования.
Для примера: в регуляторе температуры сигнал на выходе (мощность нагревателя) уменьшается при приближении к температуре уставки, и система стабилизируется при такой мощности, которая равна тепловым потерям. Температура не сможет достигнуть заданного значения, так как мощность нагревателя станет равна 0, и он постепенно начнет остывать.
Стоит заметить, что П-регулятор дает нулевую статическую ошибку по каналу задание-выход для объектов без самовыравнивания.
Чем большим коэффициент усиления, то есть, чем больше разница между входом и выходом, тем меньше наша статическая ошибка. Но рост этого коэффициента может привести к автоколебаниям в системе, а дальнейшее его увеличение приведет к потере устойчивости. Если добавить интегральную составляющую к сигналу пропорционального регулятора, получим ПИ-регулятор, если к ним добавить еще и дифференциальную — ПИД-регулятор.
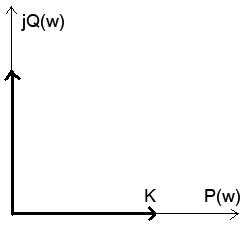
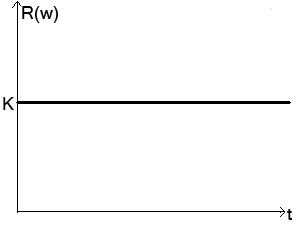
Ниже приведены некоторые характеристики П-регулятора который, по сути, является пропорциональным звеном.
Основные зависимости.
Tags законы регулирования общие сведения
autoworks.com.ua
ПИ регулятор температуры
Началось все с необходимости в создании сушилки для плат с нанесенным аэрозольным фоторезистом.
Для этих целей был собран вот такой нагреватель:
намотанный нихромовой нитью, при этом потребляемый ток от 12 В блока питания составляет 3,6 А.
Накрывается эта вся конструкция коробочкой, и температура внутри достигает через несколько минут до 70 градусов.
Поскольку такой нагреватель хоть и выполняет свои функции, но был довольно скучен, поэтому было решено собрать ПИД регулятор температуры для данного нагревателя.
После некоторых размышлений по поводу ПИД регулирования и взирая на текущую деятельность связаную с мощным и несовсем насосным оборудованием которое управляется частотниками, кстати все они настроены на ПИ регулирование. Собственно температура как и давление не может изменится мгновенно и поэтому Д составляющую было решено выкинуть из системы регулирования.
Мощность в нагрузке будет регулироваться ШИМом так что вообщем ничего особенного, силовой ключ IRFZ44N, управляющий контроллер Atmega8, 4 кнопки, UART для общения с ПК, ЖКИ дисплей 1602 для отображения, DS18B20 для измерения температуры.
Здесь роль нагрузки выпала на долю двигателя, в жизни там включен нагреватель.
Если со схемой все понятно, то с программой не все так гладко, как хотелось бы.
ПИД в пидивикии
Мы применяем рекуррентную формулу:
и для своего случая выбрасываем Д составляющую, получаем:
E(n)=X(n)-X0(n) — невязка;
X(n) — текущее значение параметра;
X0(n) — заданое значение, к которому стремится система;
Kp — коэффициент пропорционального регулятора, задается вручную;
Ki — коэффициент интегрального регулятора, задается вручную;
В грамотной реализации программы для регулятора очень помогло использование хабр
Кроме всех упомянутых по ссылке выше фич и багов, в регуляторе еще организовано ограничение управляющей переменной в пределах 0-255, при попадании текущей температуры в пределы +1/-1 градус, для более быстрого выхода температуры на заданное значение, фактически отбрасывается накопленое значение.
Хорошо написана программа должна реализовывать переходную характеристику 3 или 4, при правильно настроенных коэффициентах.
Управление осуществляется 4 кнопками ентер (En), ескейп (Es), плюс (+), минус (-). Подача питания при зажатой кнопке En это вход в меню, где можно настроить температуру уставки и коэффициенты Kp и Ki. Так же для ПК написана програма через которую можно смотреть уставку так и менять ее, а также каждые 2 с при запущенной программе текущая температура записывается в екселевский файл, при отсутствии связи с устройством записываются нули.
И так с программой и схемой все понятно, настала очередь печатной платы. Дисплей соединяется с основной платой шлейфом, кнопки размещаются на отдельной плате и подключаются к внешнему разъему как и датчик температуры, нагреватель. Так же на внешний разъем выведен UART для фозможности связи с ПК.
Печатная плата клавиатуры
Дисплей приклеен на термоклей к корпусу, кстати с прорезью под дисплей накосячил, должно закрыться фальшпанелью, кнопки размещены на верхней грани корпуса, плата приклеена термоклеем, под кнопки прорезаны отверстия, тоже закроются фальшпанелью, на нижней грани корпуса выведены клемники для подключения периферии. Здесь есть светодиод зеленый для индикации работы прибора. Шлейф клавиатуры припаян сразу к главной плате, клемник для подключения внешней клавиатуры остался, но не используется.
Нагреватель накрывается сверху коробкой с отверстием сверху где ставленый датчик температуры.
Картинка поясняющая настройки меню регулятора:
Я настраивал регулятор по методике которая описана здесь
График температуры нагрева от комнатной температуры до 40 градусов при коэфициентах П=40 и И=0,55
Поскольку система не имеет охладителя то переход по температуре вниз осуществляется за счет естественного остывания всмей системы и является весьма длительным.
При правильно настроеных коэфициентах стабильность температуры держится в пределах 0,1 градуса:
Регулирование температуры уставки можно осуществлять по средством программы на ПК, для этого необходим переходник USB-UART или COM-UART, программа стабильно работает с WinXP и WIN7, с остальными не проверял. Так же программа создает в текущей папке файл temperature.xls в который каждые 2 с пишется текущее значение температуры.
При обрыве связи с устройством:
Новая уставка вводится в специальное поле и после нажатия кнопки «Установить» передается в прибор.
Все значения введеные с клавиатуры после нажатия кнопки En после выбора значения записываются в ЕЕПРОМ и при новом включении прибора остаются, значение уставки введеные с ПК после сброса питания устройства не сохраняются.
Недоработки по устройству которые при желании можно устранить:
— отсутсвует регулированое охлаждение;
— уставка введеная с ПК не сохраняется при сбросе устройства;
— нет возможности настраивать устройство с ПК.
— в файл с температурой не пишется время выборки.
Несколько фото того что получилось:
Старая версия:
Видео работы устройства:
График построенный по режиму снятому на видео:
Я прошивал через бутлоудер chip45boot2. Для загрузки прошивки на контроллер достаточно иметь переходник USB-UART или COM-UART, так же данный бутлоудер поддерживает загрузку прошивки по RS-485, но перед этим придется прошить контроллер обычным программатором. Бутлоудер позволит обновлять прошивку при выходе новой версии без дополнительных мучений. Вы можете использовать любой другой бутлоудер, который работает с UART или не пользоватся им вовсе.
Фьюзы:
Естественно применять ПИ регулятор для сушки фоторезиста это чересчур, но возможных применений для него весьма много.
Доп. ссылки на видео, если нормально не вставилось:
часть1
часть2
Файлы:
схема, проект для протеуса
прошивка бутлоадером для 8 меги
Печатные платы
Файлы прошивок
Описание бутлоадера
Все вопросы в Форум.
Как вам эта статья? | Заработало ли это устройство у вас? |
www.radiokot.ru
Как следует из названия, в этой статье мы дадим точное представление о структуре и работе ПИД-контроллера. Однако сначала, давайте познакомимся с ПИД-контроллерами.
ПИД-регуляторы находятся в широком диапазоне применений для управления промышленными процессами. Приблизительно 95% операций с замкнутым контуром в промышленной автоматизации используют ПИД-регуляторы. PID обозначает Пропорционально-интегральная-диференциальная составляющая. Эти три контроллера объединены таким образом, что он создает управляющий сигнал.
В качестве контроллера обратной связи он обеспечивает выход управления на желаемых уровнях. ПИД-регулирование осуществлялось с помощью аналоговых электронных компонентов, перед изобретением микропроцессоров. Но сегодня все ПИД-контроллеры обрабатываются микропроцессорами. ПрограммируемыеПрограммируемые логические контроллеры также имеют встроенные настройки ПИД-регулятора. Благодаря гибкости и надежности ПИД-регуляторов, они традиционно используются в системах управления технологическим процессом.
Работа ПИД-регулятора
При использовании недорогого простого контроллера возможны только два состояния управления, например, полностью ВКЛ или полностью ВЫКЛ. Он используется для настроек с ограничением контроля, в котором эти два состояния управления достаточно для целей управления. Однако характер этого контроля ограничивает его использование и, следовательно, заменяется ПИД-контроллерами.
ПИД-регулятор поддерживает выход таким образом, что между переменной процесса и заданной точкой / желаемым выходом с помощью операций замкнутого контура имеется нулевая ошибка. ПИД использует три основных поведения управления, которые объясняются ниже.
П-контроллер:
Пропорциональный или П-регулятор дает выход, который пропорционален текущей ошибке e (t). Он сравнивает желаемую или заданную точку с фактическим значением или значением процесса обратной связи. Полученная ошибка умножается на пропорциональную константу, чтобы получить выход. Если значение ошибки равно нулю, то выход этого контроллера равен нулю.
Этот контроллер требует смещения или ручной сброс при использовании отдельно. Это происходит потому, что он никогда не достигает состояния устойчивого состояния. Он обеспечивает стабильную работу, но всегда поддерживает постоянную ошибку. Скорость реакции возрастает при увеличении пропорциональной константы Kр.
И-контроллер
Из-за ограничения П-контроллера, где всегда существует смещение между переменной процесса и заданным значением, необходим И-контроллер, который обеспечивает необходимые действия для устранения ошибки установившегося состояния. Он интегрирует ошибку в течение периода времени, пока значение ошибки не достигнет нуля. Он содержит значение для конечного устройства управления, при котором ошибка становится равной нулю.
Интегральное управление уменьшает его выход, когда происходит отрицательная ошибка. Он ограничивает скорость реакции и влияет на стабильность системы. Скорость реакции увеличивается за счет уменьшения интегрального усиления Ki.
На приведенном выше рисунке, когда коэффициент усиления И-контроллера уменьшается, ошибка установившегося режима также продолжает уменьшаться. В большинстве случаев контроллер ПИ используется, в частности, когда требуется высокая скорость ответа.
При использовании ПИ-регулятора выход И-контроллера ограничен некоторым диапазоном для преодоления интегральных условий, когда интегральный выход растет даже при нулевом состоянии ошибки из-за нелинейности на установке.
Д-контроллер
И-контроллер не может предсказать будущее поведение ошибки. Поэтому он реагирует нормально после изменения заданного значения. Д-контроллер преодолевает эту проблему, ожидая будущего поведения ошибки. Его выход зависит от скорости изменения погрешности за время, умноженное на постоянную производной. Это дает начало запуска для выхода, тем самым увеличивая системный отклик.
На приведенном выше рисунке ответ контроллера Д больше, по сравнению с контроллером ПИ, а также время установления выходного сигнала уменьшается. Это улучшает стабильность системы за счет компенсации фазового запаздывания, вызванного И-контроллером. Увеличение производного усиления увеличивает скорость реакции..
Итак, наконец, мы заметили, что, объединив эти три контроллера, мы получим желаемый ответ для системы. Различные производители разрабатывают различные алгоритмы ПИД.
Методы настройки ПИД-регулятора
Перед началом работы ПИД-регулятора он должен быть настроен на динамику контролируемого процесса. Дизайнеры дают значения по умолчанию для параметров П, И, Д, и эти значения не могут дать желаемую производительность, а иногда приводят к нестабильности и медленным характеристикам управления. Разработаны различные методы настройки для настройки ПИД-регуляторов и требуют от оператора большого внимания для выбора наилучших значений пропорциональных, интегральных и диференциальных коэффициентов. Некоторые из них приведены ниже.
Метод проб и ошибок: это простой способ настройки ПИД-регулятора. Пока система или контроллер работают, мы можем настроить контроллер. В этом методе сначала нужно установить значения Ki и Kd в нуль и увеличить пропорциональный коэффициент (Kp), пока система не достигнет колебательного поведения. Как только он осциллирует, отрегулируйте Ki (интегральный термин), чтобы колебания остановились и, наконец, отрегулировали Д, чтобы получить быстрый отклик.
Технологическая кривая технологического процесса: это метод настройки с открытым циклом. Он производит ответ, когда к системе применяется шаг ввода. Первоначально мы должны вручную вводить некоторые данные управления в систему и записывать кривую ответа.
После этого нам нужно рассчитать наклон, неподвижное время, время нарастания кривой и, наконец, подставить эти значения в уравнениях П, И и Д, чтобы получить значения коэффициента усиления ПИД.
Метод Zeigler-Nichols: Zeigler-Nichols предложил методы замкнутого контура для настройки ПИД-регулятора. Это метод непрерывного циклирования и метод демпфирования колебаний. Процедуры для обоих методов одинаковы, но поведение колебаний различно. При этом сначала нужно установить постоянную p-контроллера, Kp на определенное значение, а значения Ki и Kd равны нулю. Пропорциональный коэффициент усиления увеличивается до тех пор, пока система не будет колебаться с постоянной амплитудой.
Усиление, при котором система производит постоянные колебания, называется конечным усилением (Ku), а период колебаний называется предельным периодом (Pc). Как только это достигнуто, мы можем ввести значения P, I и D в ПИД-контроллере по таблице Zeigler-Nichols, зависит от контроллера, используемого как P, PI или PID, как показано ниже.
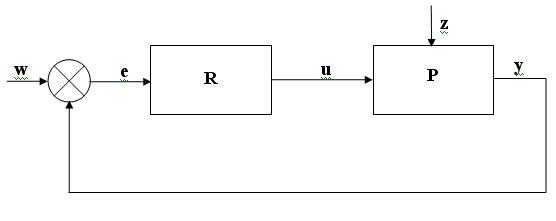
Структура ПИД-регулятора
ПИД-регулятор состоит из трех членов, а именно пропорционального, интегрального и диференциального. Объединенная работа этих трех контроллеров дает стратегию управления процессом контроля. ПИД-регулятор управляет переменными процесса, такими как давление, скорость, температура, расход и т. д. В некоторых приложениях используются ПИД-регуляторы в каскадных схемах, где для достижения контроля используются два или более ПИД.
На приведенном выше рисунке показана структура ПИД-регулятора. Он состоит из блока PID, который дает свой вывод для обработки блока. Процесс / установка состоит из конечных устройств управления, таких как исполнительные механизмы, регулирующие клапаны и другие управляющие устройства для управления различными процессами промышленности / установки.
Сигнал обратной связи от технологической установки сравнивается с уставкой или сигналом u (t), и соответствующий сигнал ошибки e (t) подается на алгоритм ПИД-регулирования. Согласно пропорциональным, интегральным и диференциальным расчетам в алгоритме, контроллер производит комбинированный ответ или управляемый выход, который применяется к устройствам управления установкой.
Все управляющие приложения не нуждаются во всех трех элементах управления. Комбинации, такие как элементы управления PI и PD, очень часто используются в практических приложениях.
webhamster.ru